点云分割与PointNet
作者: Soumik Rakshit, Sayak Paul
创建日期: 2020/10/23
最后修改: 2020/10/24
描述: 基于PointNet模型的点云分割实现。

介绍
“点云”是一种重要的数据结构,用于存储几何形状数据。 由于其不规则的格式,它通常在深度学习应用中被转换为 规则的3D体素网格或图像集合,这一步使得数据变得不必要的大。 PointNet系列模型通过直接处理点云,尊重 点数据的置换不变性属性,从而解决了这个问题。PointNet系列 模型为从物体分类、部件分割到 场景语义解析的应用提供了一个简单、统一的架构。
在这个示例中,我们演示了PointNet架构在形状分割中的实现。
参考文献
- PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
- 使用PointNet进行点云分类
- 空间变换网络
导入库
import os
import json
import random
import numpy as np
import pandas as pd
from tqdm import tqdm
from glob import glob
import tensorflow as tf # 用于 tf.data
import keras
from keras import layers
import matplotlib.pyplot as plt
下载数据集
ShapeNet数据集是一个正在进行的努力,旨在建立一个富有注释的大规模3D形状数据集。ShapeNetCore是完整ShapeNet 数据集的一个子集,包含干净的单个3D模型和人工验证的类别及对齐 注释。它涵盖了55个常见物体类别,约有51,300个独特的3D模型。
在这个示例中,我们使用PASCAL 3D+的12个物体类别之一, 作为ShapenetCore数据集的一部分。
dataset_url = "https://git.io/JiY4i"
dataset_path = keras.utils.get_file(
fname="shapenet.zip",
origin=dataset_url,
cache_subdir="datasets",
hash_algorithm="auto",
extract=True,
archive_format="auto",
cache_dir="datasets",
)
加载数据集
我们解析数据集元数据,以便轻松将模型类别映射到其 各自的目录,并将分割类映射到可视化所需的颜色。
with open("/tmp/.keras/datasets/PartAnnotation/metadata.json") as json_file:
metadata = json.load(json_file)
print(metadata)
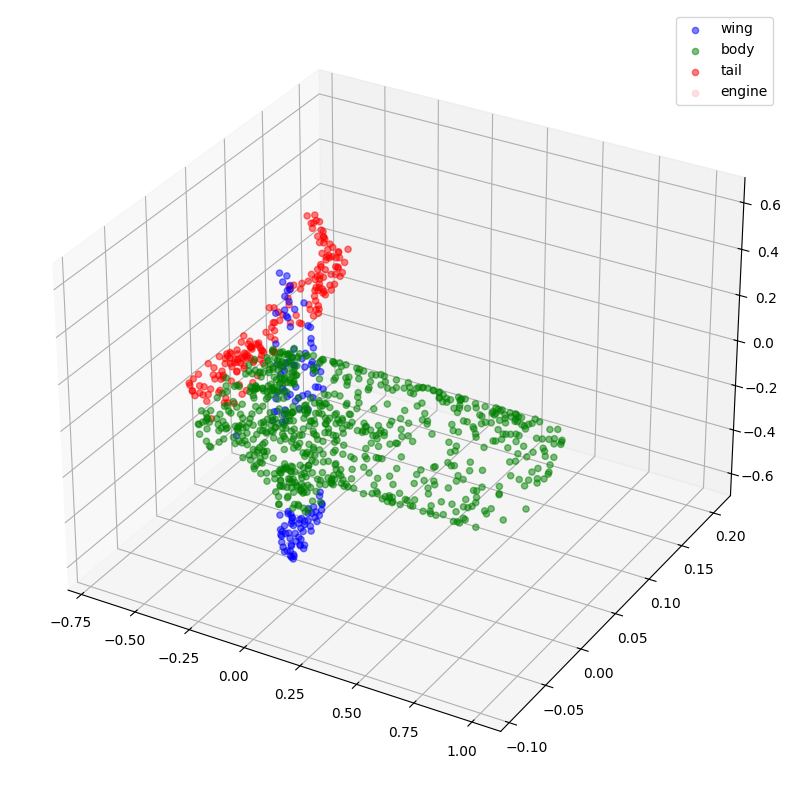
{'Airplane': {'directory': '02691156', 'lables': ['wing', 'body', 'tail', 'engine'], 'colors': ['blue', 'green', 'red', 'pink']}, 'Bag': {'directory': '02773838', 'lables': ['handle', 'body'], 'colors': ['blue', 'green']}, 'Cap': {'directory': '02954340', 'lables': ['panels', 'peak'], 'colors': ['blue', 'green']}, 'Car': {'directory': '02958343', 'lables': ['wheel', 'hood', 'roof'], 'colors': ['blue', 'green', 'red']}, 'Chair': {'directory': '03001627', 'lables': ['leg', 'arm', 'back', 'seat'], 'colors': ['blue', 'green', 'red', 'pink']}, 'Earphone': {'directory': '03261776', 'lables': ['earphone', 'headband'], 'colors': ['blue', 'green']}, 'Guitar': {'directory': '03467517', 'lables': ['head', 'body', 'neck'], 'colors': ['blue', 'green', 'red']}, 'Knife': {'directory': '03624134', 'lables': ['handle', 'blade'], 'colors': ['blue', 'green']}, 'Lamp': {'directory': '03636649', 'lables': ['canopy', 'lampshade', 'base'], 'colors': ['blue', 'green', 'red']}, 'Laptop': {'directory': '03642806', 'lables': ['keyboard'], 'colors': ['blue']}, 'Motorbike': {'directory': '03790512', 'lables': ['wheel', 'handle', 'gas_tank', 'light', 'seat'], 'colors': ['blue', 'green', 'red', 'pink', 'yellow']}, 'Mug': {'directory': '03797390', 'lables': ['handle'], 'colors': ['blue']}, 'Pistol': {'directory': '03948459', 'lables': ['trigger_and_guard', 'handle', 'barrel'], 'colors': ['blue', 'green', 'red']}, 'Rocket': {'directory': '04099429', 'lables': ['nose', 'body', 'fin'], 'colors': ['blue', 'green', 'red']}, 'Skateboard': {'directory': '04225987', 'lables': ['wheel', 'deck'], 'colors': ['blue', 'green']}, 'Table': {'directory': '04379243', 'lables': ['leg', 'top'], 'colors': ['blue', 'green']}}
在这个例子中,我们训练 PointNet 来分割 飞机 模型的部件。
points_dir = "/tmp/.keras/datasets/PartAnnotation/{}/points".format(
metadata["Airplane"]["directory"]
)
labels_dir = "/tmp/.keras/datasets/PartAnnotation/{}/points_label".format(
metadata["Airplane"]["directory"]
)
LABELS = metadata["Airplane"]["lables"]
COLORS = metadata["Airplane"]["colors"]
VAL_SPLIT = 0.2
NUM_SAMPLE_POINTS = 1024
BATCH_SIZE = 32
EPOCHS = 60
INITIAL_LR = 1e-3
数据集结构
我们从飞机点云及其标签生成以下内存数据结构:
point_clouds是一个np.array对象的列表,表示以 x、y 和 z 坐标形式的点云数据。轴 0 代表点云中的点数,轴 1 代表坐标。all_labels是一个列表,表示每个坐标的标签,类型为字符串(主要用于可视化目的)。test_point_clouds的格式与point_clouds相同,但没有对应的点云标签。all_labels是np.array对象的列表,表示每个坐标的点云标签,分别对应于point_clouds列表。point_cloud_labels是np.array对象的列表,表示每个坐标的点云标签,以独热编码形式表示,分别对应于point_clouds列表。
point_clouds, test_point_clouds = [], []
point_cloud_labels, all_labels = [], []
points_files = glob(os.path.join(points_dir, "*.pts"))
for point_file in tqdm(points_files):
point_cloud = np.loadtxt(point_file)
if point_cloud.shape[0] < NUM_SAMPLE_POINTS:
continue
# 获取当前点云的文件 ID 以解析其
# 标签。
file_id = point_file.split("/")[-1].split(".")[0]
label_data, num_labels = {}, 0
for label in LABELS:
label_file = os.path.join(labels_dir, label, file_id + ".seg")
if os.path.exists(label_file):
label_data[label] = np.loadtxt(label_file).astype("float32")
num_labels = len(label_data[label])
# 具有标签的点云将是我们的训练样本。
try:
label_map = ["none"] * num_labels
for label in LABELS:
for i, data in enumerate(label_data[label]):
label_map[i] = label if data == 1 else label_map[i]
label_data = [
LABELS.index(label) if label != "none" else len(LABELS)
for label in label_map
]
# 应用独热编码到密集标签表示。
label_data = keras.utils.to_categorical(label_data, num_classes=len(LABELS) + 1)
point_clouds.append(point_cloud)
point_cloud_labels.append(label_data)
all_labels.append(label_map)
except KeyError:
test_point_clouds.append(point_cloud)
100%|██████████████████████████████████████████████████████████████████████| 4045/4045 [01:30<00:00, 44.54it/s]
接下来,我们查看一下刚刚生成的内存数组中的一些样本:
for _ in range(5):
i = random.randint(0, len(point_clouds) - 1)
print(f"point_clouds[{i}].shape:", point_clouds[0].shape)
print(f"point_cloud_labels[{i}].shape:", point_cloud_labels[0].shape)
for j in range(5):
print(
f"all_labels[{i}][{j}]:",
all_labels[i][j],
f"\tpoint_cloud_labels[{i}][{j}]:",
point_cloud_labels[i][j],
"\n",
)
point_clouds[333].shape: (2571, 3)
point_cloud_labels[333].shape: (2571, 5)
all_labels[333][0]: 尾部 point_cloud_labels[333][0]: [0. 0. 1. 0. 0.]
all_labels[333][1]: 翼 point_cloud_labels[333][1]: [1. 0. 0. 0. 0.]
all_labels[333][2]: 尾部 point_cloud_labels[333][2]: [0. 0. 1. 0. 0.]
all_labels[333][3]: 引擎 point_cloud_labels[333][3]: [0. 0. 0. 1. 0.]
all_labels[333][4]: 翼 point_cloud_labels[333][4]: [1. 0. 0. 0. 0.]
point_clouds[3273].shape: (2571, 3)
point_cloud_labels[3273].shape: (2571, 5)
all_labels[3273][0]: 机身 point_cloud_labels[3273][0]: [0. 1. 0. 0. 0.]
all_labels[3273][1]: 机身 point_cloud_labels[3273][1]: [0. 1. 0. 0. 0.]
all_labels[3273][2]: 尾部 point_cloud_labels[3273][2]: [0. 0. 1. 0. 0.]
all_labels[3273][3]: 翼 point_cloud_labels[3273][3]: [1. 0. 0. 0. 0.]
all_labels[3273][4]: 翼 point_cloud_labels[3273][4]: [1. 0. 0. 0. 0.]
point_clouds[929].shape: (2571, 3)
point_cloud_labels[929].shape: (2571, 5)
all_labels[929][0]: 身体 point_cloud_labels[929][0]: [0. 1. 0. 0. 0.]
all_labels[929][1]: 尾巴 point_cloud_labels[929][1]: [0. 0. 1. 0. 0.]
all_labels[929][2]: 翅膀 point_cloud_labels[929][2]: [1. 0. 0. 0. 0.]
all_labels[929][3]: 尾巴 point_cloud_labels[929][3]: [0. 0. 1. 0. 0.]
all_labels[929][4]: 身体 point_cloud_labels[929][4]: [0. 1. 0. 0. 0.]
point_clouds[496].shape: (2571, 3)
point_cloud_labels[496].shape: (2571, 5)
all_labels[496][0]: 身体 point_cloud_labels[496][0]: [0. 1. 0. 0. 0.]
all_labels[496][1]: 身体 point_cloud_labels[496][1]: [0. 1. 0. 0. 0.]
all_labels[496][2]: 身体 point_cloud_labels[496][2]: [0. 1. 0. 0. 0.]
all_labels[496][3]: 翅膀 point_cloud_labels[496][3]: [1. 0. 0. 0. 0.]
all_labels[496][4]: 身体 point_cloud_labels[496][4]: [0. 1. 0. 0. 0.]
point_clouds[3508].shape: (2571, 3)
point_cloud_labels[3508].shape: (2571, 5)
all_labels[3508][0]: 身体 point_cloud_labels[3508][0]: [0. 1. 0. 0. 0.]
all_labels[3508][1]: 身体 point_cloud_labels[3508][1]: [0. 1. 0. 0. 0.]
all_labels[3508][2]: 身体 point_cloud_labels[3508][2]: [0. 1. 0. 0. 0.]
all_labels[3508][3]: 身体 point_cloud_labels[3508][3]: [0. 1. 0. 0. 0.]
all_labels[3508][4]: 身体 point_cloud_labels[3508][4]: [0. 1. 0. 0. 0.]
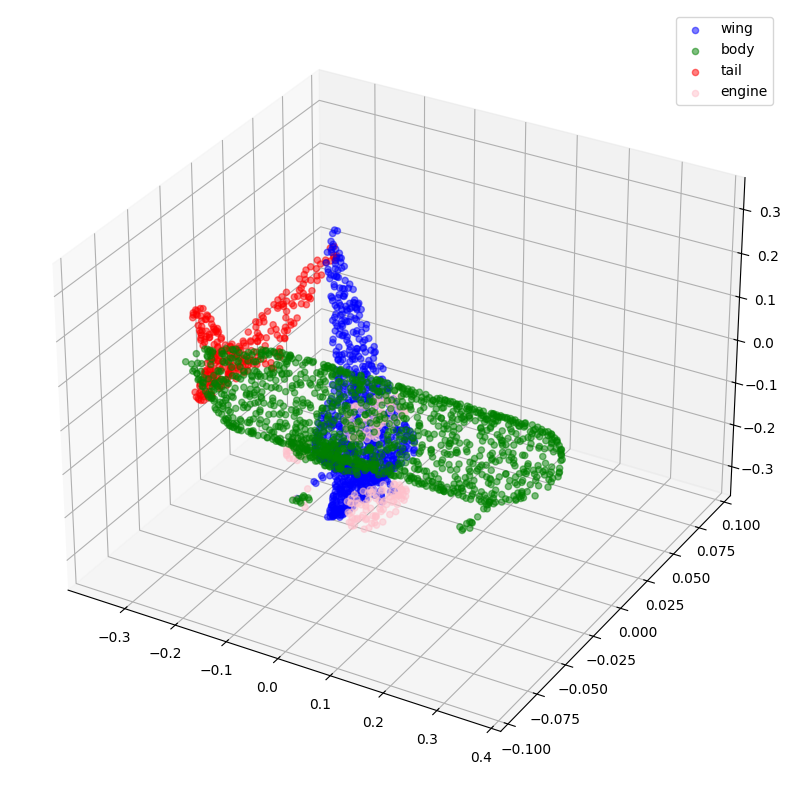
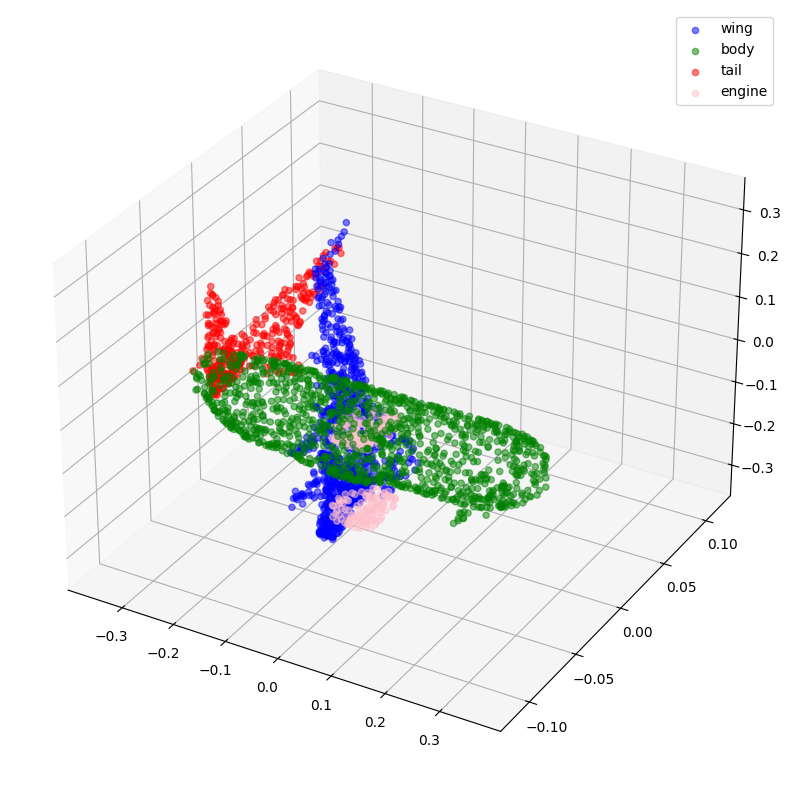
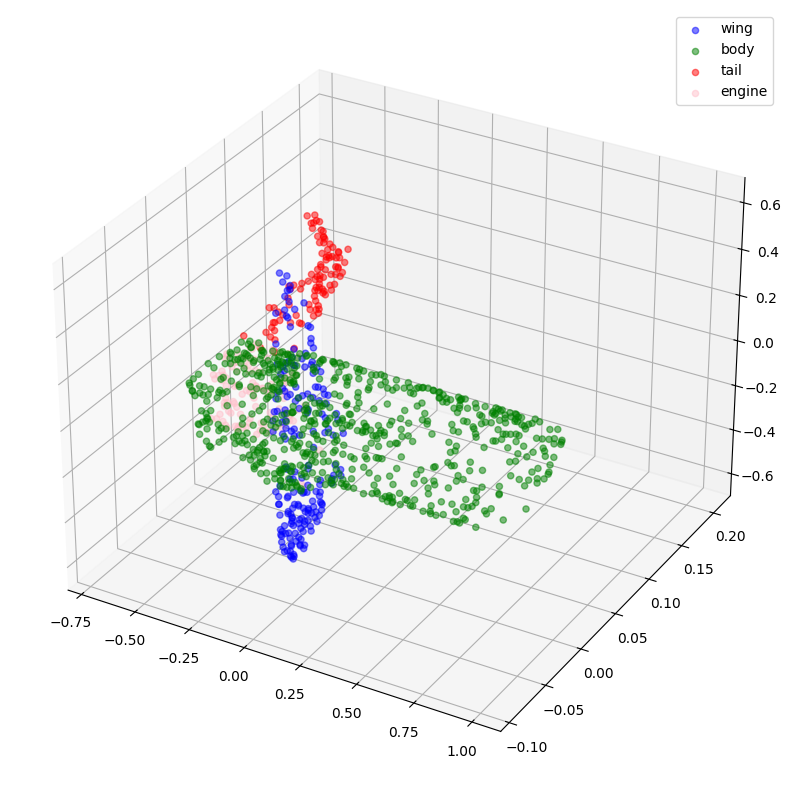
现在,让我们可视化一些点云及其标签。
def visualize_data(point_cloud, labels):
df = pd.DataFrame(
data={
"x": point_cloud[:, 0],
"y": point_cloud[:, 1],
"z": point_cloud[:, 2],
"label": labels,
}
)
fig = plt.figure(figsize=(15, 10))
ax = plt.axes(projection="3d")
for index, label in enumerate(LABELS):
c_df = df[df["label"] == label]
try:
ax.scatter(
c_df["x"], c_df["y"], c_df["z"], label=label, alpha=0.5, c=COLORS[index]
)
except IndexError:
pass
ax.legend()
plt.show()
visualize_data(point_clouds[0], all_labels[0])
visualize_data(point_clouds[300], all_labels[300])
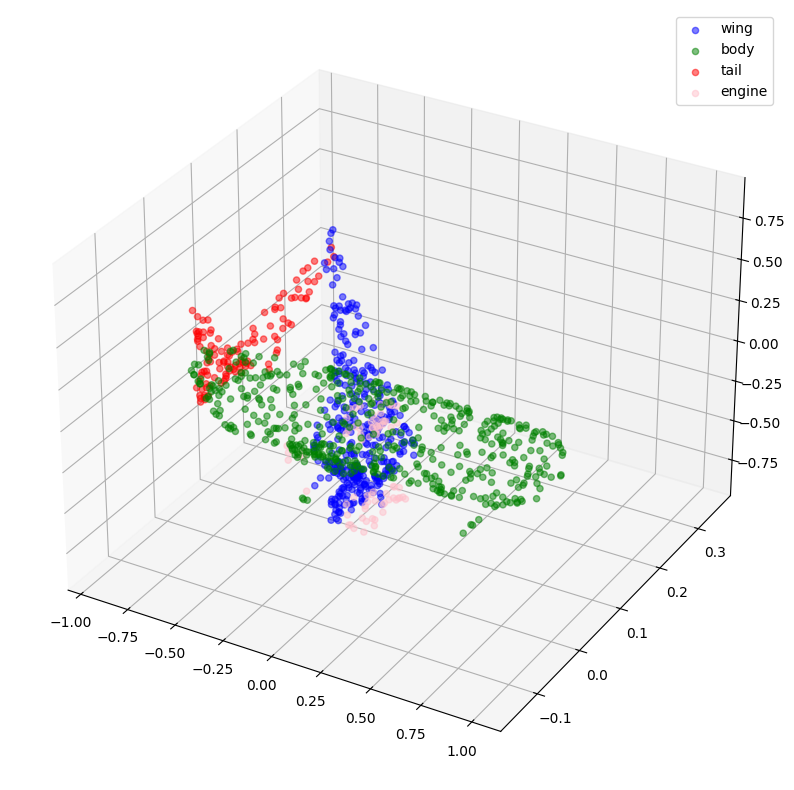
预处理
注意我们加载的所有点云包含不固定数量的点,这使得将它们批量处理变得困难。为了克服这个问题,我们随机从每个点云中抽取固定数量的点。我们还对点云进行归一化,以使数据对缩放不变。
for index in tqdm(range(len(point_clouds))):
current_point_cloud = point_clouds[index]
current_label_cloud = point_cloud_labels[index]
current_labels = all_labels[index]
num_points = len(current_point_cloud)
# 随机抽取相应的索引。
sampled_indices = random.sample(list(range(num_points)), NUM_SAMPLE_POINTS)
# 抽取对应于抽取索引的点。
sampled_point_cloud = np.array([current_point_cloud[i] for i in sampled_indices])
# 抽取对应的一热编码标签。
sampled_label_cloud = np.array([current_label_cloud[i] for i in sampled_indices])
# 抽取用于可视化的对应标签。
sampled_labels = np.array([current_labels[i] for i in sampled_indices])
# 归一化抽取的点云。
norm_point_cloud = sampled_point_cloud - np.mean(sampled_point_cloud, axis=0)
norm_point_cloud /= np.max(np.linalg.norm(norm_point_cloud, axis=1))
point_clouds[index] = norm_point_cloud
point_cloud_labels[index] = sampled_label_cloud
all_labels[index] = sampled_labels
100%|█████████████████████████████████████████████████████████████████████| 3694/3694 [00:08<00:00, 446.45it/s]
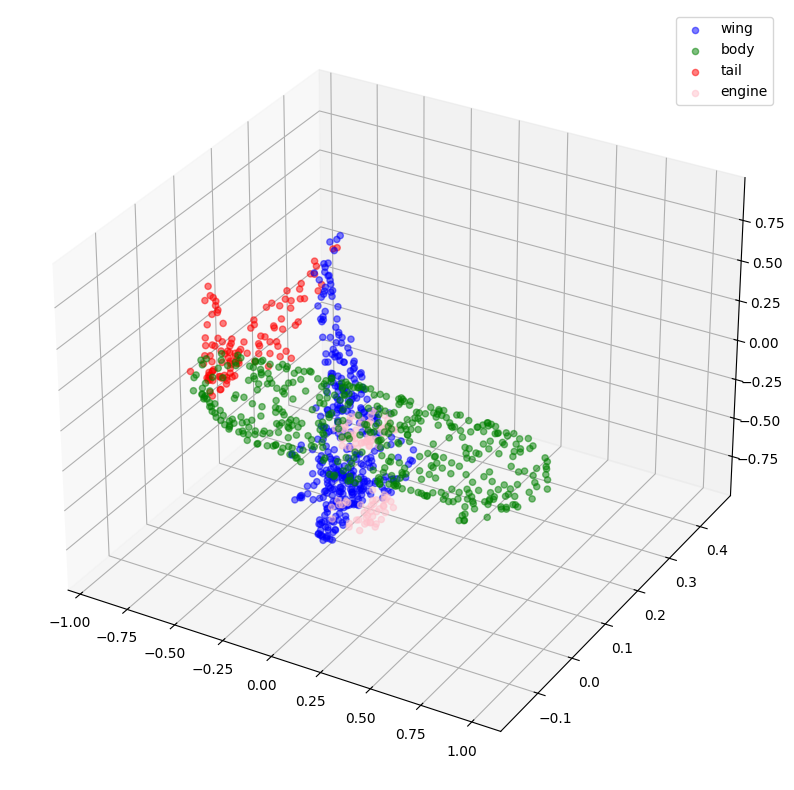
让我们可视化抽样和归一化后的点云及其对应标签。
visualize_data(point_clouds[0], all_labels[0])
visualize_data(point_clouds[300], all_labels[300])
创建 TensorFlow 数据集
我们为训练和验证数据创建 tf.data.Dataset 对象。
我们还通过对训练点云应用随机抖动来增强训练数据。
def load_data(point_cloud_batch, label_cloud_batch):
point_cloud_batch.set_shape([NUM_SAMPLE_POINTS, 3])
label_cloud_batch.set_shape([NUM_SAMPLE_POINTS, len(LABELS) + 1])
return point_cloud_batch, label_cloud_batch
def augment(point_cloud_batch, label_cloud_batch):
noise = tf.random.uniform(
tf.shape(label_cloud_batch), -0.001, 0.001, dtype=tf.float64
)
point_cloud_batch += noise[:, :, :3]
return point_cloud_batch, label_cloud_batch
def generate_dataset(point_clouds, label_clouds, is_training=True):
dataset = tf.data.Dataset.from_tensor_slices((point_clouds, label_clouds))
dataset = dataset.shuffle(BATCH_SIZE * 100) if is_training else dataset
dataset = dataset.map(load_data, num_parallel_calls=tf.data.AUTOTUNE)
dataset = dataset.batch(batch_size=BATCH_SIZE)
dataset = (
dataset.map(augment, num_parallel_calls=tf.data.AUTOTUNE)
if is_training
else dataset
)
return dataset
split_index = int(len(point_clouds) * (1 - VAL_SPLIT))
train_point_clouds = point_clouds[:split_index]
train_label_cloud = point_cloud_labels[:split_index]
total_training_examples = len(train_point_clouds)
val_point_clouds = point_clouds[split_index:]
val_label_cloud = point_cloud_labels[split_index:]
print("训练点云数量:", len(train_point_clouds))
print("训练点云标签数量:", len(train_label_cloud))
print("验证点云数量:", len(val_point_clouds))
print("验证点云标签数量:", len(val_label_cloud))
train_dataset = generate_dataset(train_point_clouds, train_label_cloud)
val_dataset = generate_dataset(val_point_clouds, val_label_cloud, is_training=False)
print("训练数据集:", train_dataset)
print("验证数据集:", val_dataset)
训练点云数量: 2955
训练点云标签数量: 2955
验证点云数量: 739
验证点云标签数量: 739
训练数据集: <_ParallelMapDataset element_spec=(TensorSpec(shape=(None, 1024, 3), dtype=tf.float64, name=None), TensorSpec(shape=(None, 1024, 5), dtype=tf.float64, name=None))>
验证数据集: <_BatchDataset element_spec=(TensorSpec(shape=(None, 1024, 3), dtype=tf.float64, name=None), TensorSpec(shape=(None, 1024, 5), dtype=tf.float64, name=None))>
PointNet 模型
下图描绘了 PointNet 模型家族的内部结构:

考虑到 PointNet 的目的是处理无序集合的坐标作为输入数据, 其架构需要匹配点云数据的以下特征属性:
排列不变性
由于点云数据的无结构特性,由 n 个点组成的扫描有 n!
种排列。后续的数据处理必须对不同的表示不变。为了使 PointNet 对输入排列不变,我们使用
对 n 个输入点映射到更高维空间后的对称函数(例如最大池化)。结果是一个
全局特征向量,旨在捕捉 n 个输入点的聚合特征。全局特征向量与
局部点特征一起用于分割。

变换不变性
如果物体经过某些变换,例如平移或缩放,分割输出应保持不变。对于给定的输入点云,我们应用适当的刚性或仿射变换以实现姿态归一化。因为每个 n 个输入点都表示为一个向量,并且独立地映射到嵌入空间,应用几何变换简单地就是将每个点与变换矩阵进行矩阵乘法。这是受到
空间变换网络 概念的启发。
构成 T-Net 的操作受到 PointNet 高级架构的启发。MLP(或全连接层)用于将输入点独立且相同地映射到更高维空间;最大池化用于编码全局特征向量,随后用全连接层降低其维度。最终全连接层的输入依赖特征与全球可训练的权重和偏差结合,产生一个 3x3 的变换矩阵。

点间交互
邻近点之间的交互通常携带有用信息(即,单个点不应被孤立处理)。而分类只需进行 使用全局特征,分割必须能够利用局部点特征和全局点特征。
注意:本节中展示的图形来自于 原始论文。
现在我们知道了构成PointNet模型的各个部分,我们可以实现该模型。 我们首先实现基本模块,即卷积块和多层感知机块。
def conv_block(x, filters, name):
x = layers.Conv1D(filters, kernel_size=1, padding="valid", name=f"{name}_conv")(x)
x = layers.BatchNormalization(name=f"{name}_batch_norm")(x)
return layers.Activation("relu", name=f"{name}_relu")(x)
def mlp_block(x, filters, name):
x = layers.Dense(filters, name=f"{name}_dense")(x)
x = layers.BatchNormalization(name=f"{name}_batch_norm")(x)
return layers.Activation("relu", name=f"{name}_relu")(x)
我们实现一个正则化器(来源于 this example) 以强制特征空间中的正交性。这是确保 转换特征的幅度不会变化太大的必要条件。
class OrthogonalRegularizer(keras.regularizers.Regularizer):
"""参考:https://keras.io/examples/vision/pointnet/#build-a-model"""
def __init__(self, num_features, l2reg=0.001):
self.num_features = num_features
self.l2reg = l2reg
self.identity = keras.ops.eye(num_features)
def __call__(self, x):
x = keras.ops.reshape(x, (-1, self.num_features, self.num_features))
xxt = keras.ops.tensordot(x, x, axes=(2, 2))
xxt = keras.ops.reshape(xxt, (-1, self.num_features, self.num_features))
return keras.ops.sum(self.l2reg * keras.ops.square(xxt - self.identity))
def get_config(self):
config = super().get_config()
config.update({"num_features": self.num_features, "l2reg_strength": self.l2reg})
return config
下一部分是我们之前解释的变换网络。
def transformation_net(inputs, num_features, name):
"""
参考:https://keras.io/examples/vision/pointnet/#build-a-model。
`filters`值来自原始论文:
https://arxiv.org/abs/1612.00593。
"""
x = conv_block(inputs, filters=64, name=f"{name}_1")
x = conv_block(x, filters=128, name=f"{name}_2")
x = conv_block(x, filters=1024, name=f"{name}_3")
x = layers.GlobalMaxPooling1D()(x)
x = mlp_block(x, filters=512, name=f"{name}_1_1")
x = mlp_block(x, filters=256, name=f"{name}_2_1")
return layers.Dense(
num_features * num_features,
kernel_initializer="zeros",
bias_initializer=keras.initializers.Constant(np.eye(num_features).flatten()),
activity_regularizer=OrthogonalRegularizer(num_features),
name=f"{name}_final",
)(x)
def transformation_block(inputs, num_features, name):
transformed_features = transformation_net(inputs, num_features, name=name)
transformed_features = layers.Reshape((num_features, num_features))(
transformed_features
)
return layers.Dot(axes=(2, 1), name=f"{name}_mm")([inputs, transformed_features])
最后,我们将上述模块组合在一起并实现分割模型。
def get_shape_segmentation_model(num_points, num_classes):
input_points = keras.Input(shape=(None, 3))
# PointNet 分类网络。
transformed_inputs = transformation_block(
input_points, num_features=3, name="input_transformation_block"
)
features_64 = conv_block(transformed_inputs, filters=64, name="features_64")
features_128_1 = conv_block(features_64, filters=128, name="features_128_1")
features_128_2 = conv_block(features_128_1, filters=128, name="features_128_2")
transformed_features = transformation_block(
features_128_2, num_features=128, name="transformed_features"
)
features_512 = conv_block(transformed_features, filters=512, name="features_512")
features_2048 = conv_block(features_512, filters=2048, name="pre_maxpool_block")
global_features = layers.MaxPool1D(pool_size=num_points, name="global_features")(
features_2048
)
global_features = keras.ops.tile(global_features, [1, num_points, 1])
# 分割头。
segmentation_input = layers.Concatenate(name="segmentation_input")(
[
features_64,
features_128_1,
features_128_2,
transformed_features,
features_512,
global_features,
]
)
segmentation_features = conv_block(
segmentation_input, filters=128, name="segmentation_features"
)
outputs = layers.Conv1D(
num_classes, kernel_size=1, activation="softmax", name="segmentation_head"
)(segmentation_features)
return keras.Model(input_points, outputs)
实例化模型
x, y = next(iter(train_dataset))
num_points = x.shape[1]
num_classes = y.shape[-1]
segmentation_model = get_shape_segmentation_model(num_points, num_classes)
segmentation_model.summary()
模型: "functional_1"
┏━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━┳━━━━━━━━━━━━━━━━━━━━━━┓ ┃ Layer (type) ┃ Output Shape ┃ Param # ┃ Connected to ┃ ┡━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━╇━━━━━━━━━━━━━━━━━━━━━━┩ │ input_layer │ (None, None, 3) │ 0 │ - │ │ (InputLayer) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, 64) │ 256 │ input_layer[0][0] │ │ (Conv1D) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, 64) │ 256 │ input_transformatio… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, 64) │ 0 │ input_transformatio… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, 128) │ 8,320 │ input_transformatio… │ │ (Conv1D) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, 128) │ 512 │ input_transformatio… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, 128) │ 0 │ input_transformatio… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, │ 132,096 │ input_transformatio… │ │ (Conv1D) │ 1024) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, │ 4,096 │ input_transformatio… │ │ (BatchNormalizatio… │ 1024) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, │ 0 │ input_transformatio… │ │ (Activation) │ 1024) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ global_max_pooling… │ (None, 1024) │ 0 │ input_transformatio… │ │ (GlobalMaxPooling1… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, 512) │ 524,800 │ global_max_pooling1… │ │ (Dense) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, 512) │ 2,048 │ input_transformatio… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, 512) │ 0 │ input_transformatio… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, 256) │ 131,328 │ input_transformatio… │ │ (Dense) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, 256) │ 1,024 │ input_transformatio… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, 256) │ 0 │ input_transformatio… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, 9) │ 2,313 │ input_transformatio… │ │ (Dense) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ reshape (Reshape) │ (None, 3, 3) │ 0 │ input_transformatio… │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ input_transformati… │ (None, None, 3) │ 0 │ input_layer[0][0], │ │ (Dot) │ │ │ reshape[0][0] │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_64_conv │ (None, None, 64) │ 256 │ input_transformatio… │ │ (Conv1D) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_64_batch_… │ (None, None, 64) │ 256 │ features_64_conv[0]… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_64_relu │ (None, None, 64) │ 0 │ features_64_batch_n… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_128_1_conv │ (None, None, 128) │ 8,320 │ features_64_relu[0]… │ │ (Conv1D) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_128_1_bat… │ (None, None, 128) │ 512 │ features_128_1_conv… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_128_1_relu │ (None, None, 128) │ 0 │ features_128_1_batc… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_128_2_conv │ (None, None, 128) │ 16,512 │ features_128_1_relu… │ │ (Conv1D) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_128_2_bat… │ (None, None, 128) │ 512 │ features_128_2_conv… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_128_2_relu │ (None, None, 128) │ 0 │ features_128_2_batc… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, 64) │ 8,256 │ features_128_2_relu… │ │ (Conv1D) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, 64) │ 256 │ transformed_feature… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, 64) │ 0 │ transformed_feature… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, 128) │ 8,320 │ transformed_feature… │ │ (Conv1D) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, 128) │ 512 │ transformed_feature… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, 128) │ 0 │ transformed_feature… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, │ 132,096 │ transformed_feature… │ │ (Conv1D) │ 1024) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, │ 4,096 │ transformed_feature… │ │ (BatchNormalizatio… │ 1024) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, │ 0 │ transformed_feature… │ │ (Activation) │ 1024) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ global_max_pooling… │ (None, 1024) │ 0 │ transformed_feature… │ │ (GlobalMaxPooling1… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, 512) │ 524,800 │ global_max_pooling1… │ │ (Dense) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, 512) │ 2,048 │ transformed_feature… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, 512) │ 0 │ transformed_feature… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, 256) │ 131,328 │ transformed_feature… │ │ (Dense) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, 256) │ 1,024 │ transformed_feature… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, 256) │ 0 │ transformed_feature… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, 16384) │ 4,210,… │ transformed_feature… │ │ (Dense) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ reshape_1 (Reshape) │ (None, 128, 128) │ 0 │ transformed_feature… │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ transformed_featur… │ (None, None, 128) │ 0 │ features_128_2_relu… │ │ (Dot) │ │ │ reshape_1[0][0] │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_512_conv │ (None, None, 512) │ 66,048 │ transformed_feature… │ │ (Conv1D) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_512_batch… │ (None, None, 512) │ 2,048 │ features_512_conv[0… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ features_512_relu │ (None, None, 512) │ 0 │ features_512_batch_… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ pre_maxpool_block_… │ (None, None, │ 1,050,… │ features_512_relu[0… │ │ (Conv1D) │ 2048) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ pre_maxpool_block_… │ (None, None, │ 8,192 │ pre_maxpool_block_c… │ │ (BatchNormalizatio… │ 2048) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ pre_maxpool_block_… │ (None, None, │ 0 │ pre_maxpool_block_b… │ │ (Activation) │ 2048) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ global_features │ (None, None, │ 0 │ pre_maxpool_block_r… │ │ (MaxPooling1D) │ 2048) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ tile (Tile) │ (None, None, │ 0 │ global_features[0][… │ │ │ 2048) │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ segmentation_input │ (None, None, │ 0 │ features_64_relu[0]… │ │ (Concatenate) │ 3008) │ │ features_128_1_relu… │ │ │ │ │ features_128_2_relu… │ │ │ │ │ transformed_feature… │ │ │ │ │ features_512_relu[0… │ │ │ │ │ tile[0][0] │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ segmentation_featu… │ (None, None, 128) │ 385,152 │ segmentation_input[… │ │ (Conv1D) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ segmentation_featu… │ (None, None, 128) │ 512 │ segmentation_featur… │ │ (BatchNormalizatio… │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ segmentation_featu… │ (None, None, 128) │ 0 │ segmentation_featur… │ │ (Activation) │ │ │ │ ├─────────────────────┼───────────────────┼─────────┼──────────────────────┤ │ segmentation_head │ (None, None, 5) │ 645 │ segmentation_featur… │ │ (Conv1D) │ │ │ │ └─────────────────────┴───────────────────┴─────────┴──────────────────────┘
Total params: 7,370,062 (28.11 MB)
Trainable params: 7,356,110 (28.06 MB)
Non-trainable params: 13,952 (54.50 KB)
训练
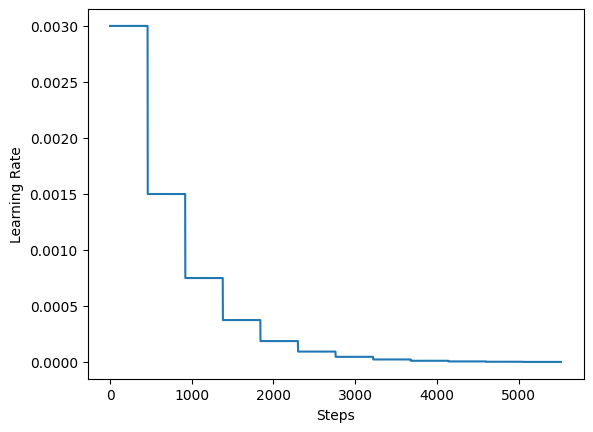
对于训练,作者建议使用一个学习率调度,每20个训练周期就将初始学习率减半。在这个例子中,我们使用5个训练周期。
steps_per_epoch = total_training_examples // BATCH_SIZE
total_training_steps = steps_per_epoch * EPOCHS
print(f"每个周期的步数: {steps_per_epoch}.")
print(f"总训练步数: {total_training_steps}.")
lr_schedule = keras.optimizers.schedules.ExponentialDecay(
initial_learning_rate=0.003,
decay_steps=steps_per_epoch * 5,
decay_rate=0.5,
staircase=True,
)
steps = range(total_training_steps)
lrs = [lr_schedule(step) for step in steps]
plt.plot(lrs)
plt.xlabel("步数")
plt.ylabel("学习率")
plt.show()
每个周期的步数: 92.
总训练步数: 5520.
最后,我们实现一个实用程序来运行我们的实验并启动模型训练。
def run_experiment(epochs):
segmentation_model = get_shape_segmentation_model(num_points, num_classes)
segmentation_model.compile(
optimizer=keras.optimizers.Adam(learning_rate=lr_schedule),
loss=keras.losses.CategoricalCrossentropy(),
metrics=["accuracy"],
)
checkpoint_filepath = "checkpoint.weights.h5"
checkpoint_callback = keras.callbacks.ModelCheckpoint(
checkpoint_filepath,
monitor="val_loss",
save_best_only=True,
save_weights_only=True,
)
history = segmentation_model.fit(
train_dataset,
validation_data=val_dataset,
epochs=epochs,
callbacks=[checkpoint_callback],
)
segmentation_model.load_weights(checkpoint_filepath)
return segmentation_model, history
segmentation_model, history = run_experiment(epochs=EPOCHS)
Epoch 1/60
2/93 ━━━━━━━━━━━━━━━━━━━━ 7s 86ms/step - accuracy: 0.1427 - loss: 48748.8203
WARNING: All log messages before absl::InitializeLog() is called are written to STDERR
I0000 00:00:1699916678.434176 90326 device_compiler.h:187] Compiled cluster using XLA! This line is logged at most once for the lifetime of the process.
93/93 ━━━━━━━━━━━━━━━━━━━━ 53s 259ms/step - accuracy: 0.3739 - loss: 27980.7305 - val_accuracy: 0.4340 - val_loss: 10361231.0000
Epoch 2/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 48s 82ms/step - accuracy: 0.6355 - loss: 339.9151 - val_accuracy: 0.3820 - val_loss: 19069320.0000
Epoch 3/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.6695 - loss: 281.5728 - val_accuracy: 0.2859 - val_loss: 15993839.0000
Epoch 4/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.6812 - loss: 253.0939 - val_accuracy: 0.2287 - val_loss: 9633191.0000
Epoch 5/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.6873 - loss: 231.1317 - val_accuracy: 0.3030 - val_loss: 6001454.0000
Epoch 6/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.6860 - loss: 216.6793 - val_accuracy: 0.0620 - val_loss: 1945100.8750
Epoch 7/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.6947 - loss: 210.2683 - val_accuracy: 0.4539 - val_loss: 7908162.5000
Epoch 8/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7014 - loss: 203.2560 - val_accuracy: 0.4035 - val_loss: 17741164.0000
Epoch 9/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7006 - loss: 197.3710 - val_accuracy: 0.1900 - val_loss: 34120616.0000
Epoch 10/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7047 - loss: 192.0777 - val_accuracy: 0.3391 - val_loss: 33157422.0000
Epoch 11/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7102 - loss: 188.4875 - val_accuracy: 0.3394 - val_loss: 4630613.5000
Epoch 12/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.7186 - loss: 184.9940 - val_accuracy: 0.1662 - val_loss: 487790.1250
Epoch 13/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.7175 - loss: 182.7206 - val_accuracy: 0.1602 - val_loss: 70590.3203
Epoch 14/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7159 - loss: 180.5028 - val_accuracy: 0.1631 - val_loss: 16990.2324
Epoch 15/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7201 - loss: 180.1674 - val_accuracy: 0.2318 - val_loss: 4992.7783
Epoch 16/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7222 - loss: 176.5523 - val_accuracy: 0.6246 - val_loss: 647.5634
Epoch 17/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7291 - loss: 175.6139 - val_accuracy: 0.6551 - val_loss: 324.0956
Epoch 18/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7285 - loss: 175.0228 - val_accuracy: 0.6430 - val_loss: 257.9340
Epoch 19/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7300 - loss: 172.7668 - val_accuracy: 0.6399 - val_loss: 253.2745
Epoch 20/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.7316 - loss: 172.9001 - val_accuracy: 0.6084 - val_loss: 232.9293
Epoch 21/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.7364 - loss: 170.8767 - val_accuracy: 0.6451 - val_loss: 191.7183
Epoch 22/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7395 - loss: 171.4525 - val_accuracy: 0.6825 - val_loss: 180.2473
Epoch 23/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7392 - loss: 170.1975 - val_accuracy: 0.6095 - val_loss: 180.3243
Epoch 24/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7362 - loss: 169.2144 - val_accuracy: 0.6017 - val_loss: 178.3013
Epoch 25/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7409 - loss: 169.2571 - val_accuracy: 0.6582 - val_loss: 178.3481
Epoch 26/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.7415 - loss: 167.7480 - val_accuracy: 0.6808 - val_loss: 177.8774
Epoch 27/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.7440 - loss: 167.7844 - val_accuracy: 0.7131 - val_loss: 176.5841
Epoch 28/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7423 - loss: 167.5307 - val_accuracy: 0.6891 - val_loss: 176.1687
Epoch 29/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7409 - loss: 166.4581 - val_accuracy: 0.7136 - val_loss: 174.9417
Epoch 30/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7419 - loss: 165.9243 - val_accuracy: 0.7407 - val_loss: 173.0663
Epoch 31/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7471 - loss: 166.9746 - val_accuracy: 0.7454 - val_loss: 172.9663
Epoch 32/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7472 - loss: 165.9707 - val_accuracy: 0.7480 - val_loss: 173.9868
Epoch 33/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7443 - loss: 165.9368 - val_accuracy: 0.7076 - val_loss: 174.4526
Epoch 34/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7496 - loss: 165.5322 - val_accuracy: 0.7441 - val_loss: 174.6099
Epoch 35/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7453 - loss: 164.2007 - val_accuracy: 0.7469 - val_loss: 174.2793
Epoch 36/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7503 - loss: 165.3418 - val_accuracy: 0.7469 - val_loss: 174.0812
Epoch 37/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7491 - loss: 164.4796 - val_accuracy: 0.7524 - val_loss: 173.9656
Epoch 38/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 10s 82ms/step - accuracy: 0.7489 - loss: 164.4573 - val_accuracy: 0.7516 - val_loss: 175.3401
Epoch 39/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7437 - loss: 163.4484 - val_accuracy: 0.7532 - val_loss: 173.8172
Epoch 40/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7507 - loss: 163.6720 - val_accuracy: 0.7537 - val_loss: 173.9127
Epoch 41/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7506 - loss: 164.0555 - val_accuracy: 0.7556 - val_loss: 173.0979
Epoch 42/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.7517 - loss: 164.1554 - val_accuracy: 0.7562 - val_loss: 172.8895
Epoch 43/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 10s 82ms/step - accuracy: 0.7527 - loss: 164.6351 - val_accuracy: 0.7567 - val_loss: 173.0476
Epoch 44/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7505 - loss: 164.1568 - val_accuracy: 0.7571 - val_loss: 172.2751
Epoch 45/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7500 - loss: 163.8129 - val_accuracy: 0.7579 - val_loss: 171.8897
Epoch 46/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7534 - loss: 163.6473 - val_accuracy: 0.7577 - val_loss: 172.5457
Epoch 47/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7510 - loss: 163.7318 - val_accuracy: 0.7580 - val_loss: 172.2256
Epoch 48/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7517 - loss: 163.3274 - val_accuracy: 0.7575 - val_loss: 172.3276
Epoch 49/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.7511 - loss: 163.5069 - val_accuracy: 0.7581 - val_loss: 171.2155
Epoch 50/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 89ms/step - accuracy: 0.7507 - loss: 163.7366 - val_accuracy: 0.7578 - val_loss: 171.1100
Epoch 51/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7519 - loss: 163.1190 - val_accuracy: 0.7580 - val_loss: 171.7971
Epoch 52/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 81ms/step - accuracy: 0.7510 - loss: 162.7351 - val_accuracy: 0.7579 - val_loss: 171.9780
Epoch 53/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7510 - loss: 162.9639 - val_accuracy: 0.7577 - val_loss: 171.6770
Epoch 54/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 88ms/step - accuracy: 0.7530 - loss: 162.7419 - val_accuracy: 0.7578 - val_loss: 170.5556
Epoch 55/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7515 - loss: 163.2893 - val_accuracy: 0.7582 - val_loss: 171.9172
Epoch 56/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7505 - loss: 164.2843 - val_accuracy: 0.7584 - val_loss: 171.9182
Epoch 57/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7498 - loss: 162.6679 - val_accuracy: 0.7587 - val_loss: 173.7610
Epoch 58/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7523 - loss: 163.3332 - val_accuracy: 0.7585 - val_loss: 172.5207
Epoch 59/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7529 - loss: 162.4575 - val_accuracy: 0.7586 - val_loss: 171.6861
Epoch 60/60
93/93 ━━━━━━━━━━━━━━━━━━━━ 8s 82ms/step - accuracy: 0.7498 - loss: 162.9523 - val_accuracy: 0.7586 - val_loss: 172.3012
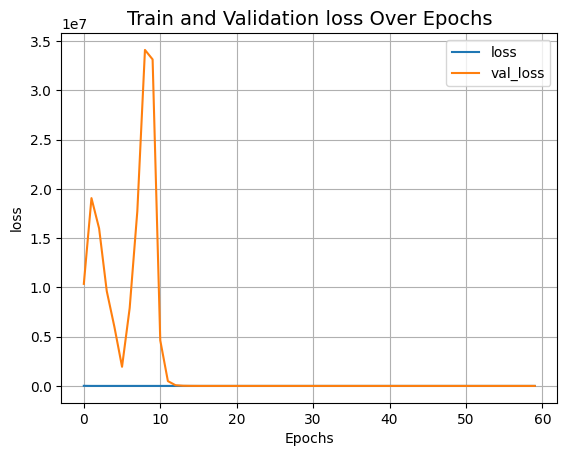
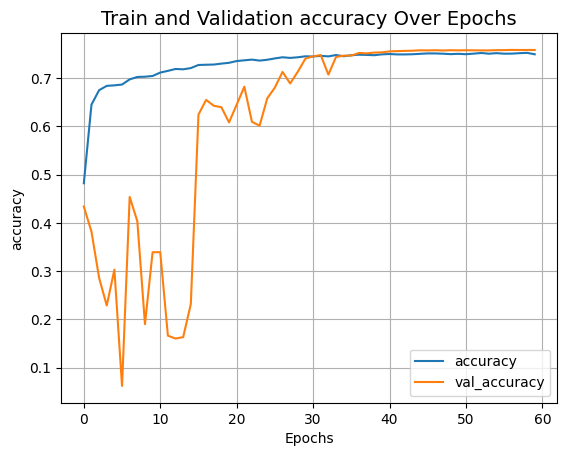
可视化训练过程
def plot_result(item):
plt.plot(history.history[item], label=item)
plt.plot(history.history["val_" + item], label="val_" + item)
plt.xlabel("训练轮数")
plt.ylabel(item)
plt.title("训练和验证 {} 随训练轮数变化".format(item), fontsize=14)
plt.legend()
plt.grid()
plt.show()
plot_result("loss")
plot_result("accuracy")
推断
validation_batch = next(iter(val_dataset))
val_predictions = segmentation_model.predict(validation_batch[0])
print(f"验证预测形状: {val_predictions.shape}")
def visualize_single_point_cloud(point_clouds, label_clouds, idx):
label_map = LABELS + ["none"]
point_cloud = point_clouds[idx]
label_cloud = label_clouds[idx]
visualize_data(point_cloud, [label_map[np.argmax(label)] for label in label_cloud])
idx = np.random.choice(len(validation_batch[0]))
print(f"选中的索引: {idx}")
# 使用真实标签进行绘图。
visualize_single_point_cloud(validation_batch[0], validation_batch[1], idx)
# 使用预测标签进行绘图。
visualize_single_point_cloud(validation_batch[0], val_predictions, idx)
1/1 ━━━━━━━━━━━━━━━━━━━━ 1s 1s/step
验证预测形状: (32, 1024, 5)
选中的索引: 26
最后的备注
如果您对该主题感兴趣,可以查看 这个仓库以获取更多信息。