
Dinitz算法及其应用#
在本教程中,我们将探讨最大流问题 [1] 和 Dinitz 算法 [2],该算法在 NetworkX 中的
algorithms/flow/dinitz_alg.py
实现。我们还将了解如何使用它来解决一些有趣的问题。
导入包#
import networkx as nx
import numpy as np
import matplotlib.pyplot as plt
import PIL
import math
from copy import deepcopy
from collections import deque
最大流问题#
动机#
假设你想尽快将一些数据发送给你的朋友,但你们之间唯一的通信/数据传输方式是通过一个点对点网络。这个点对点网络的一个有趣之处在于,它允许你沿着指定的路径发送数据,并且每对节点之间每秒可以发送的数据大小有特定的限制。
G = nx.read_gml("data/example_graph.gml")
# 从图中提取节点位置信息(用于可视化)
pos = {k: np.asarray(v) for k, v in G.nodes(data="pos")}
label_pos = deepcopy(pos)
label_pos["s"][0] = -1.15
label_pos["t"][0] = 1.20
labels = {"s": "你", "t": "朋友"}
fig, ax = plt.subplots(figsize=(16, 8))
nx.draw_networkx_edges(G, pos=pos, ax=ax, min_source_margin=20, min_target_margin=20)
nx.draw_networkx_labels(G, label_pos, labels=labels, ax=ax, font_size=16)
ax.set_xlim([-1.4, 1.4])
ax.axis("off")
# 用计算机图标装饰图像以表示节点
tr_figure = ax.transData.transform
tr_axes = fig.transFigure.inverted().transform
icon_size = abs(np.diff(ax.get_xlim())) * 0.015
icon_center = icon_size / 2
icon = PIL.Image.open("images/computer_black_144x144.png")
for n in G.nodes:
xf, yf = tr_figure(pos[n])
xa, ya = tr_axes((xf, yf))
a = plt.axes([xa - icon_center, ya - icon_center, icon_size, icon_size])
a.imshow(icon)
a.axis("off")
/usr/local/lib/python3.11/site-packages/IPython/core/events.py:82: UserWarning: Glyph 20320 (\N{CJK UNIFIED IDEOGRAPH-4F60}) missing from font(s) DejaVu Sans.
func(*args, **kwargs)
/usr/local/lib/python3.11/site-packages/IPython/core/events.py:82: UserWarning: Glyph 26379 (\N{CJK UNIFIED IDEOGRAPH-670B}) missing from font(s) DejaVu Sans.
func(*args, **kwargs)
/usr/local/lib/python3.11/site-packages/IPython/core/events.py:82: UserWarning: Glyph 21451 (\N{CJK UNIFIED IDEOGRAPH-53CB}) missing from font(s) DejaVu Sans.
func(*args, **kwargs)
/usr/local/lib/python3.11/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 20320 (\N{CJK UNIFIED IDEOGRAPH-4F60}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/usr/local/lib/python3.11/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 26379 (\N{CJK UNIFIED IDEOGRAPH-670B}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/usr/local/lib/python3.11/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 21451 (\N{CJK UNIFIED IDEOGRAPH-53CB}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
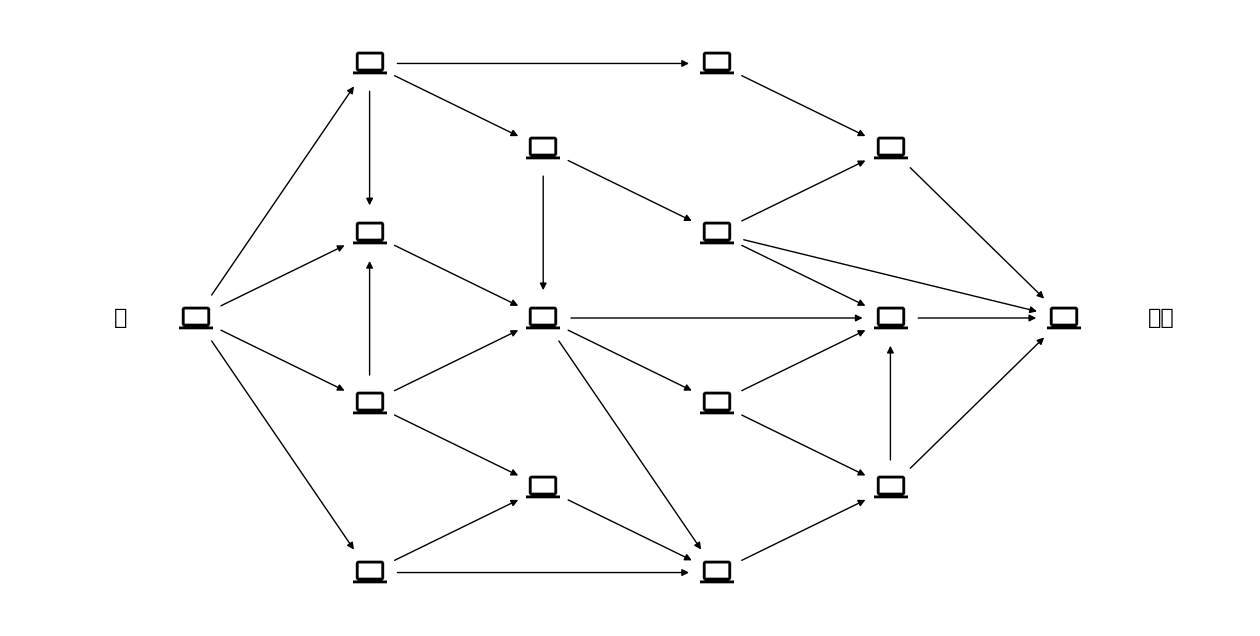
那么,你应该如何规划数据包的路径,以最短的时间发送它们呢?
请注意,在这里我们可以将数据分成小的数据包,并通过网络发送,接收方可以重新排列数据包以重建原始数据。
形式化#
那么,我们如何用图论来建模这个问题呢?
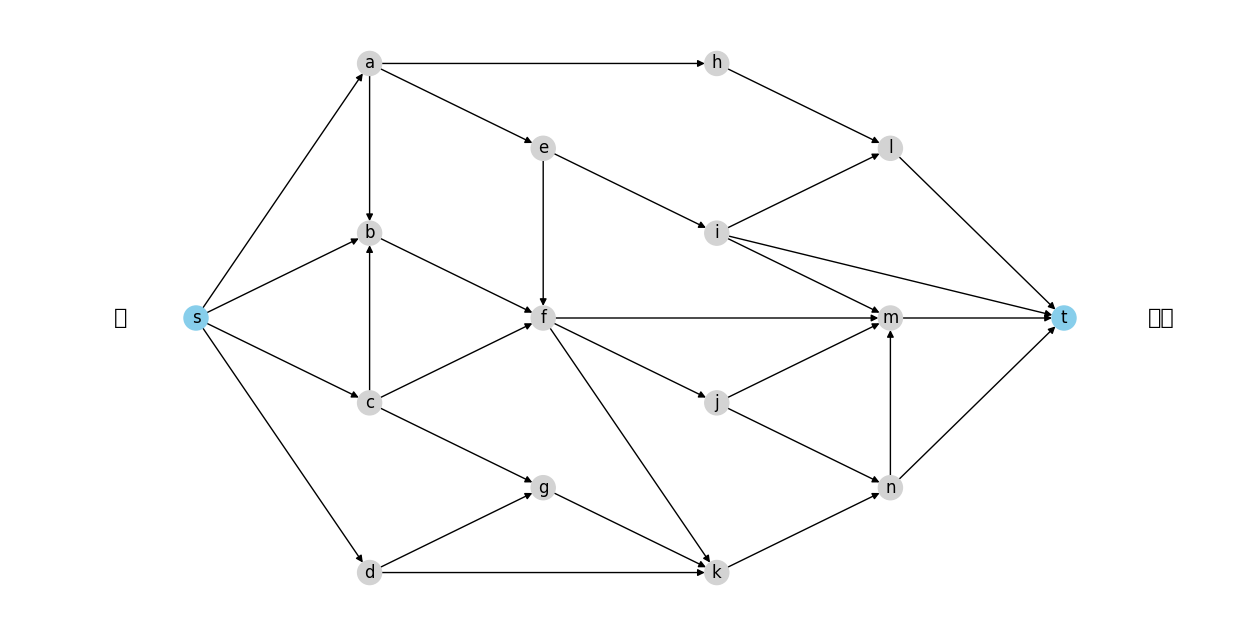
假设 \(N=(V, E)\) 表示这个点对点网络,其中 \(V\) 是节点集合(计算机),\(E\) 是边集合,边 \(uv \in E\) 表示节点 \(u\) 和节点 \(v\) 之间有连接,可以通过该连接发送数据。还有两个特殊节点,第一个是你(节点 \(s\)),第二个是你的朋友(节点 \(t\))。我们分别称它们为 源 和 汇 节点。
fig, ax = plt.subplots(figsize=(16, 8))
# 为源节点和汇节点着色
node_colors = ["skyblue" if n in {"s", "t"} else "lightgray" for n in G.nodes]
# 绘制图
nx.draw(G, pos, ax=ax, node_color=node_colors, with_labels=True)
nx.draw_networkx_labels(G, label_pos, labels=labels, ax=ax, font_size=16)
ax.set_xlim([-1.4, 1.4]);
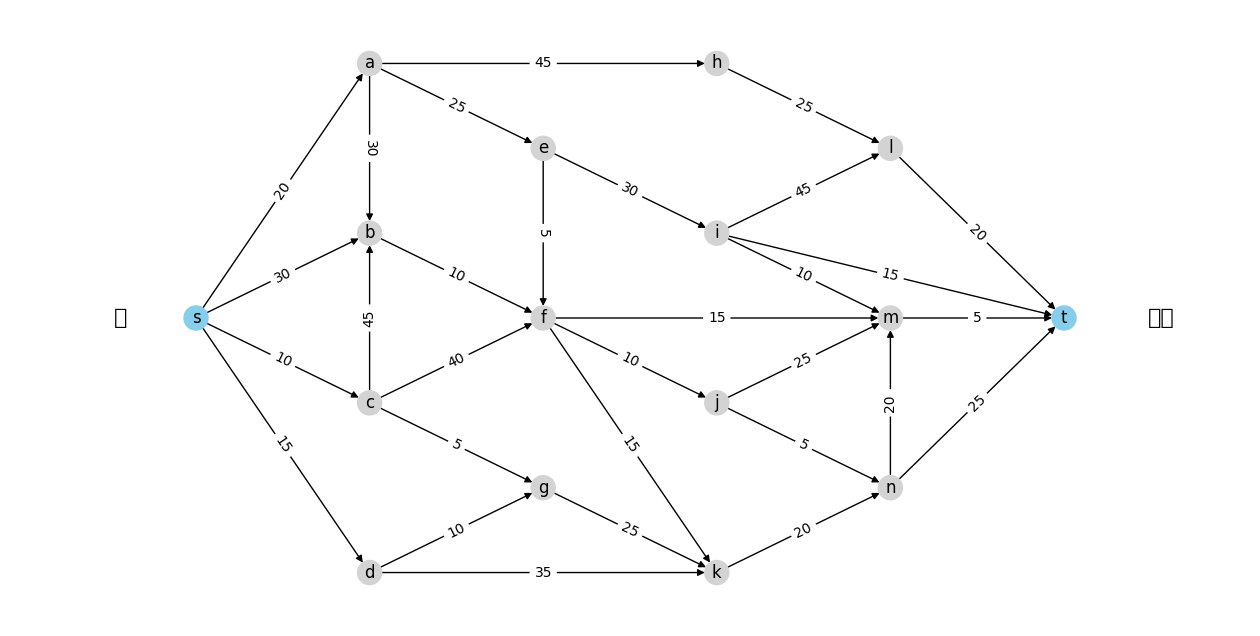
现在假设节点 \(u\) 和节点 \(v\) 相连,每秒从节点 \(u\) 发送到节点 \(v\) 的最大数据量是 \(c_{uv}\),我们称这个为边 \(uv\) 的容量。
fig, ax = plt.subplots(figsize=(16, 8))
# 标记容量
capacities = {(u, v): c for u, v, c in G.edges(data="capacity")}
# 绘制图
nx.draw(G, pos, ax=ax, node_color=node_colors, with_labels=True)
nx.draw_networkx_edge_labels(G, pos, edge_labels=capacities, ax=ax)
nx.draw_networkx_labels(G, label_pos, labels=labels, ax=ax, font_size=16)
ax.set_xlim([-1.4, 1.4]);
因此,在我们继续规划发送数据包的路径之前,我们需要一些方法来表示或规划网络。观察到任何计划都必须占用边的某些容量,因此我们可以用每个边被占用的容量值来表示计划,我们称这个计划为 流。形式上,我们可以将流定义为 \(f: E \to \mathbb{R}\),即从边 \(E\) 到实数的映射,表示我们通过边 \(uv \in E\) 以 \(f(uv)\) 的速率发送数据。
请注意,为了使这个计划有效,它必须满足以下约束条件:
容量约束: 从任何节点发送数据的速率不应超过其容量,形式上 \(f_{uv} \le c_{uv}\)
流量守恒: 数据发送至节点的速率与节点发送数据至其他节点的速率相同,除了源节点 \(s\) 和汇节点 \(t\) 之外。形式上,对于 \(v \in V \backslash \{s, t\}\),有 \(\sum\limits_{u|(u,v) \in E}f_{u,v} = \sum\limits_{w|(v,w) \in E}f_{v,w}\)。
def check_valid_flow(G, flow, source_node, target_node):
H = nx.DiGraph()
H.add_edges_from(flow.keys())
for (u, v), f in flow.items():
capacity = G[u][v]["capacity"]
H[u][v]["label"] = f"{f}/{capacity}"
# 容量约束
if f > G[u][v]["capacity"]:
H[u][v]["edgecolor"] = "red"
print(f"无效流量:容量约束在边 ({u!r}, {v!r}) 上被违反")
# 流量守恒
if v not in {source_node, target_node}:
incoming_flow = sum(
flow[(i, v)] if (i, v) in flow else 0 for i in G.predecessors(v)
)
outgoing_flow = sum(
flow[(v, o)] if (v, o) in flow else 0 for o in G.successors(v)
)
if not math.isclose(incoming_flow, outgoing_flow):
print(f"无效流量:流量守恒在节点 {v} 上被违反")
H.nodes[v]["color"] = "red"
return H
def visualize_flow(flow_graph):
"""可视化由 `check_valid_flow` 函数返回的流量。"""
fig, ax = plt.subplots(figsize=(15, 9))
# 绘制参考完整图
nx.draw(
G, pos, ax=ax, node_color=node_colors, edge_color="lightgrey", with_labels=True
)
# 在顶部绘制示例流量
flow_nc = [
"skyblue" if n in {"s", "t"} else flow_graph.nodes[n].get("color", "lightgrey")
for n in flow_graph
]
flow_ec = [flow_graph[u][v].get("edgecolor", "black") for u, v in flow_graph.edges]
edge_labels = {(u, v): lbl for u, v, lbl in flow_graph.edges(data="label")}
nx.draw(flow_graph, pos, ax=ax, node_color=flow_nc, edge_color=flow_ec)
nx.draw_networkx_edge_labels(G, pos, edge_labels=edge_labels, ax=ax);
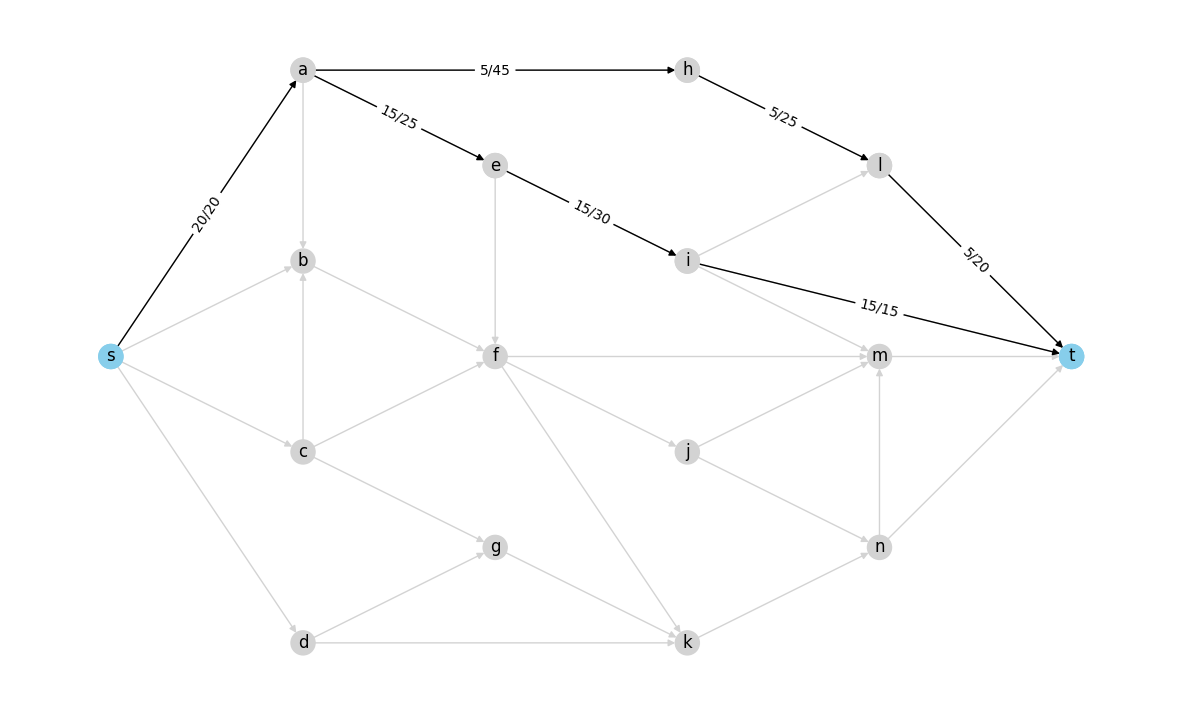
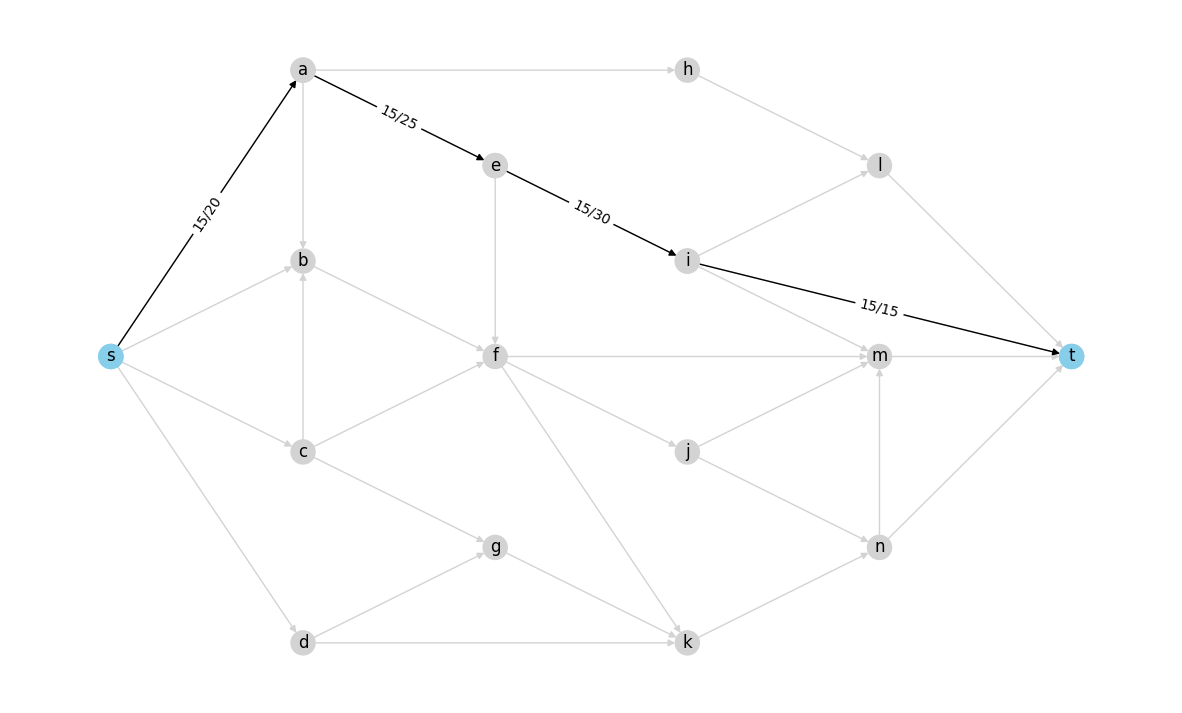
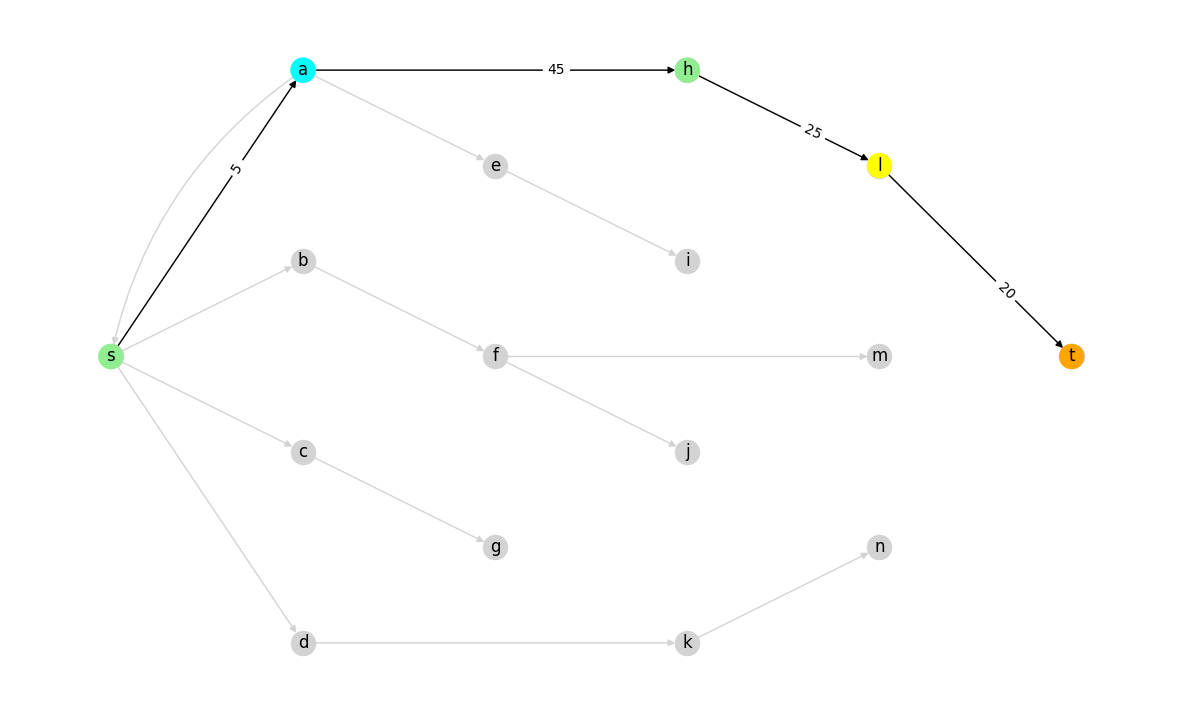
有效流量的示例:
example_flow = {
("s", "a"): 20,
("a", "e"): 15,
("e", "i"): 15,
("i", "t"): 15,
("a", "h"): 5,
("h", "l"): 5,
("l", "t"): 5,
}
flow_graph = check_valid_flow(G, example_flow, "s", "t")
visualize_flow(flow_graph)
无效流量的示例:
example_flow = {
("s", "a"): 30,
("a", "e"): 25,
("e", "i"): 15,
("i", "t"): 15,
("a", "h"): 5,
("h", "l"): 5,
("l", "t"): 5,
}
flow_graph = check_valid_flow(G, example_flow, "s", "t")
无效流量:容量约束在边 ('s', 'a') 上被违反
无效流量:流量守恒在节点 e 上被违反
visualize_flow(flow_graph)
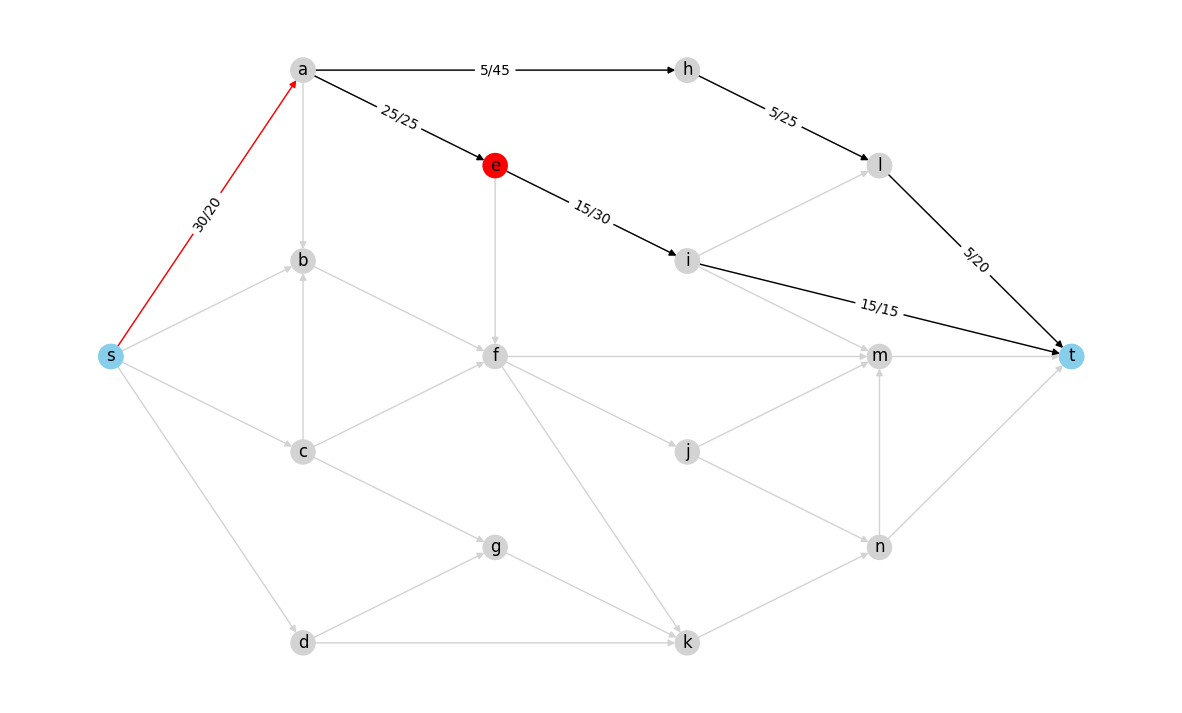
红色边不满足容量约束,红色节点不满足流量守恒。
如果我们使用这个计划/流量来发送数据,那么我们将以什么速率向朋友发送数据?
为了回答这个问题,我们需要注意到汇节点 \(t\) 接收的任何数据都将来自其邻居,因此如果我们从这些邻居到汇节点的计划/流量中求和数据速率,我们将得到 \(t\) 接收数据的总速率。形式上,我们可以称流量的值为 \(|f|=\sum\limits_{u|(u,t) \in E}f_{u,t}\)。还要注意,由于流量是守恒的,\(|f|\) 也将等于 \(\sum\limits_{u|(s,u) \in E}f_{s,u}\)。
记住我们的目标是最大化发送给朋友的数据速率,这等同于最大化流量值 \(|f|\)。
这就是最大流问题的定义。
Dinitz 算法#
在理解 Dinitz 算法的工作原理及其步骤之前,让我们先定义一些术语。
剩余容量与图#
如果我们通过容量为 \(c_{uv}\) 的边 \(uv\) 发送 \(f_{uv}\) 流量,那么我们通过 \(g_{uv}=c_{uv}-f_{uv}\) 定义剩余容量,并通过 \(N'\) 定义剩余网络,它只考虑 \(N\) 中具有非零剩余容量的边。
def residual_graph(G, flow):
H = G.copy()
for (u, v), f in flow.items():
capacity = G[u][v]["capacity"]
if f > G[u][v]["capacity"]:
raise ValueError(f"流量 {f} 超过了边 {u!r}->{v!r} 的容量。")
H[u][v]["capacity"] -= f
if H.has_edge(v, u):
H[v][u]["capacity"] += f
else:
H.add_edge(v, u, capacity=f, etype="rev")
return H
def draw_residual_graph(R, ax=None):
"""可视化由 `residual_graph` 返回的残余图。"""
if not ax:
fig, ax = plt.subplots(figsize=(15, 9))
ax.axis("off")
# 绘制节点
nx.draw_networkx_nodes(R, pos, node_color=node_colors)
nx.draw_networkx_labels(R, pos)
# 根据容量和是否由 residual_graph 添加对边进行分类
orig_edges, zero_edges, rev_edges = [], [], []
for u, v, data in R.edges(data=True):
if data.get("etype") == "rev":
rev_edges.append((u, v))
elif data["capacity"] == 0:
zero_edges.append((u, v))
else:
orig_edges.append((u, v))
# 绘制边
nx.draw_networkx_edges(R, pos, edgelist=orig_edges)
nx.draw_networkx_edges(
R,
pos,
edgelist=rev_edges,
edge_color="goldenrod",
connectionstyle="arc3,rad=0.2",
)
nx.draw_networkx_edges(
R, pos, edgelist=zero_edges, style="--", edge_color="lightgrey"
)
# 用容量标记边
rv = set(rev_edges)
fwd_caps = {(u, v): c for u, v, c in R.edges(data="capacity") if (u, v) not in rv}
rev_caps = {(u, v): c for u, v, c in R.edges(data="capacity") if (u, v) in rv}
nx.draw_networkx_edge_labels(R, pos, edge_labels=fwd_caps, label_pos=0.667)
nx.draw_networkx_edge_labels(
R, pos, edge_labels=rev_caps, label_pos=0.667, font_color="goldenrod"
)
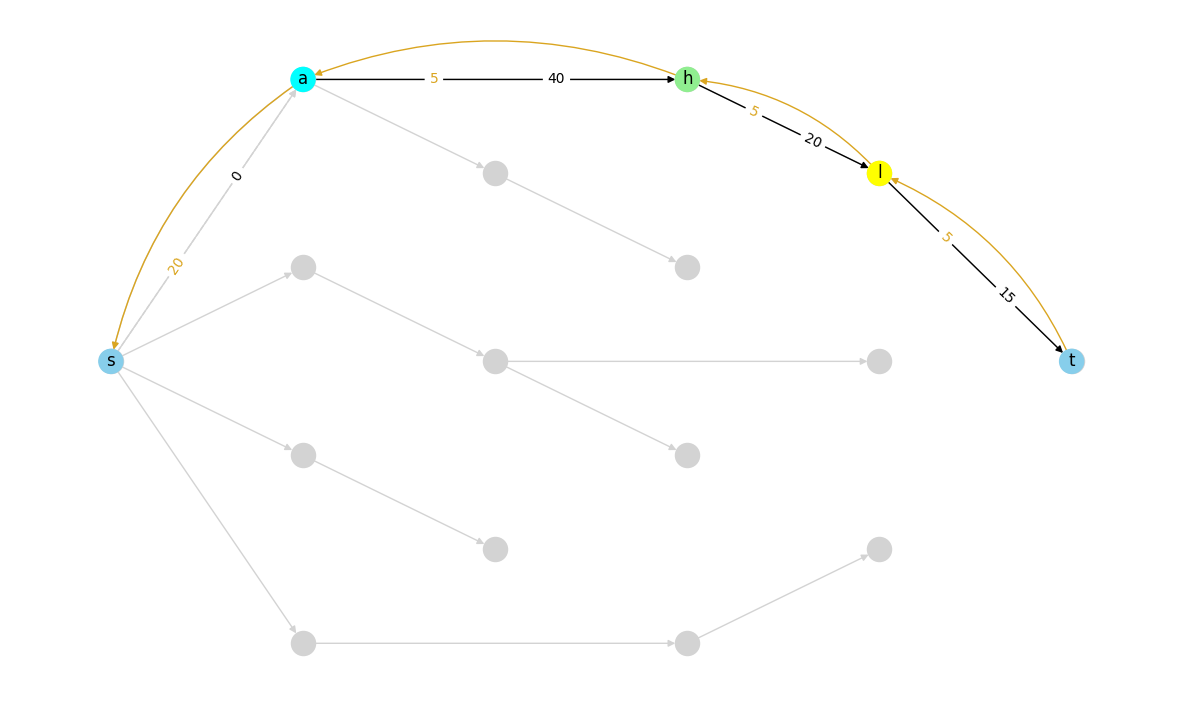
示例流程:
example_flow = {
("s", "a"): 15,
("a", "e"): 15,
("e", "i"): 15,
("i", "t"): 15,
}
visualize_flow(check_valid_flow(G, example_flow, "s", "t"))
这是上述流对应的残余网络:
R = residual_graph(G, example_flow)
draw_residual_graph(R)
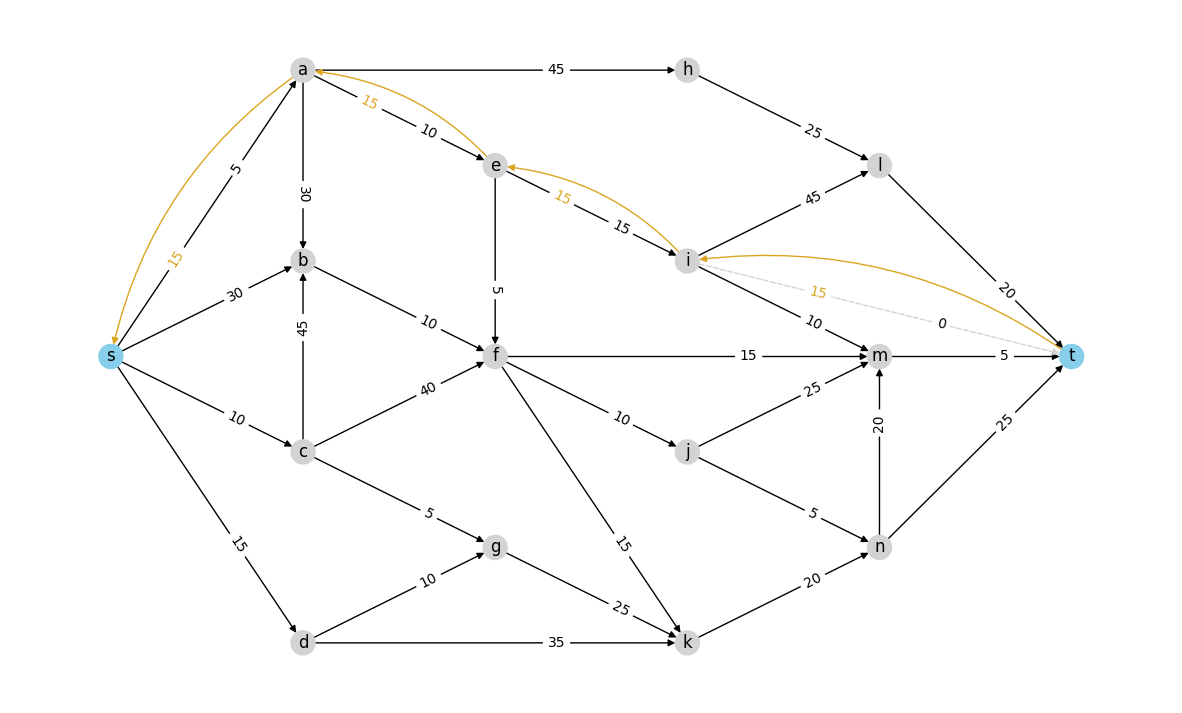
注意:在残余网络中,如果 \(N\) 中存在 \(uv\) 或 \(vu\) 边,我们同时考虑这两条边。
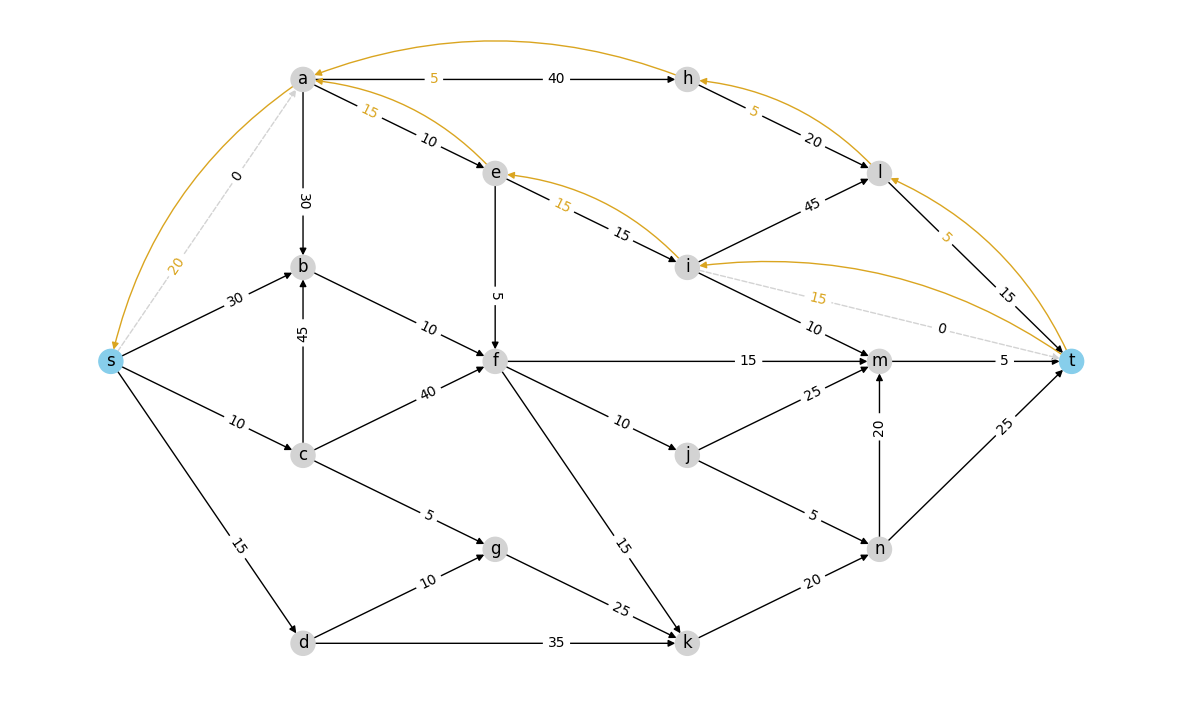
层次网络#
层次网络是残余网络的子图,当我们从源节点 \(s\) 应用广度优先搜索(BFS)时,只考虑残余网络中满足 \(c_{uv}-f_{uv}>0\) 的边,并将节点分成不同层次,然后只考虑连接两个不同层次节点的边构成的层次网络 \(L\)。
# 节点层次与颜色的映射,用于可视化
level_colors = {
1: "aqua",
2: "lightgreen",
3: "yellow",
4: "orange",
5: "lightpink",
6: "violet",
}
def level_bfs(R, flow, source_node, target_node):
"""从残余网络构建给定流的层次网络的 BFS 算法。"""
parents, level = {}, {}
queue = deque([source_node])
level[source_node] = 0
while queue:
if target_node in parents:
break
u = queue.popleft()
for v in R.successors(u):
if (v not in parents) and (R[u][v]["capacity"] > 0):
parents[v] = u
level[v] = level[u] + 1
queue.append(v)
return parents, level
def draw_level_network(R, parents, level, background=False):
fig, ax = plt.subplots(figsize=(15, 9))
ax.axis("off")
# 绘制节点
nodelist = list(level.keys())
if background:
level_nc = "lightgrey"
else:
level_nc = [level_colors[l] for l in level.values()]
level_nc[0] = level_nc[-1] = "skyblue"
nx.draw_networkx_nodes(R, pos, nodelist=nodelist, node_color=level_nc)
if not background:
nx.draw_networkx_labels(R, pos)
# 绘制边
fwd_edges = [(v, u) for u, v in parents.items() if (v, u) in G.edges]
labels = {(u, v): R[u][v]["capacity"] for u, v in fwd_edges}
ec = "lightgrey" if background else "black"
nx.draw_networkx_edges(R, pos, edgelist=fwd_edges, edge_color=ec)
if not background:
nx.draw_networkx_edge_labels(R, pos, edge_labels=labels, label_pos=0.667)
rev_edges = [(v, u) for u, v in parents.items() if (v, u) not in G.edges]
labels = {(u, v): R[u][v]["capacity"] for u, v in rev_edges}
ec = "lightgrey" if background else "goldenrod"
nx.draw_networkx_edges(
R, pos, edgelist=rev_edges, connectionstyle="arc3,rad=0.2", edge_color=ec
)
if not background:
nx.draw_networkx_edge_labels(
R, pos, edge_labels=labels, label_pos=0.667, font_color="goldenrod"
)
parents, level = level_bfs(R, example_flow, "s", "t")
draw_level_network(R, parents, level)
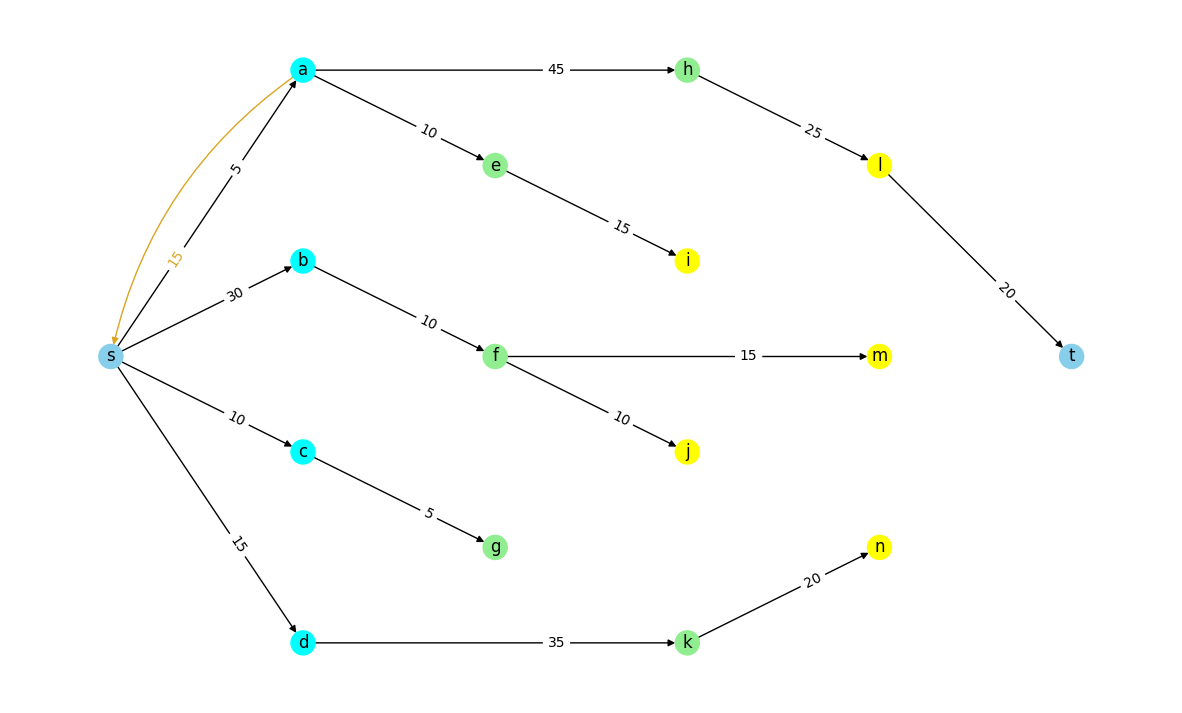
注意,如果汇节点 \(t\) 无法从源节点 \(s\) 到达,这意味着无法再通过残余网络推送更多流量。
增广路径与流量#
增广路径 \(P\) 是从源节点 \(s\) 到汇节点 \(t\) 的路径,路径上的所有边都具有正的残余容量,即 \(g_{uv}>0\) 对于 \(uv \in P\)。增广流量 \(\alpha\) 是路径 \(P\) 上所有边残余流量的最小值,即 \(\alpha = min\{g_{uv}, uv \in P\}\)。
通过沿路径 \(P\) 增广流量,意味着减少路径 \(P\) 上各边的残余容量 \(\alpha\),这将使得残余网络上至少有一条边的残余容量变为零。
我们通过在层次网络 \(L\) 上应用深度优先搜索(DFS)来寻找增广路径。
def aug_path_dfs(parents, flow, source_node, target_node):
"""从 target_node 开始使用 DFS 构建路径"""
path = []
u = target_node
f = 3 * max(flow.values()) # 初始化流量为较大值
while u != source_node:
path.append(u)
v = parents[u]
f = min(f, R.pred[u][v]["capacity"] - flow.get((u, v), 0))
u = v
path.append(source_node)
# 沿找到的路径增广流量
return path, f
增广前的增广路径:
path, min_resid_flow = aug_path_dfs(parents, example_flow, "s", "t")
# 可视化
draw_level_network(R, parents, level, background=True) # 背景中的层次图
nc = [level_colors[level[n]] for n in path]
el = [(v, u) for u, v in nx.utils.pairwise(path)]
nx.draw(R, pos, nodelist=path, edgelist=el, node_color=nc, with_labels=True)
edgelabels = {(u, v): R[u][v]["capacity"] for u, v in el}
nx.draw_networkx_edge_labels(R, pos, edge_labels=edgelabels, label_pos=0.667);
增广后的增广路径:
# 沿增广路径应用最小流量
aug_flow = {(v, u): min_resid_flow for u, v in nx.utils.pairwise(path)}
# 可视化沿路径的增广流量
draw_level_network(R, parents, level, background=True)
aug_path = residual_graph(R.subgraph(path), aug_flow)
# 子图中的节点顺序可能与 `path` 不同
nodes = list(aug_path.nodes)
node_colors = [level_colors[level[n]] for n in nodes]
node_colors[nodes.index("s")] = node_colors[nodes.index("t")] = "skyblue"
draw_residual_graph(aug_path, ax=plt.gca())
生成的新的残差网络:
R = residual_graph(R, aug_flow)
# 残差图的原始颜色方案
node_colors = ["skyblue" if n in {"s", "t"} else "lightgray" for n in R.nodes]
draw_residual_graph(R)
上述每个步骤在 Dinitz 算法中都扮演着重要角色,用于在网络中寻找最大流,总结如下。
算法#
初始化一个零值的流,\(f_{uv}=0\)
根据该流构建一个残差网络 \(N'\)
使用 BFS 查找层次网络 \(L\),如果 \(t\) 不在层次网络中则中断并输出该流
在层次网络 \(L\) 中找到一条增广路径 \(P\)
沿着路径 \(P\) 的边增广流,这将得到一个新的残差网络
使用新的残差网络 \(N'\) 重复步骤 3
在 NetworkX 中寻找最大流#
在上一节中,我们将 Dinitz 算法分解为更小的步骤,以便更好地理解整个算法。然而在实践中,无需自己实现所有这些步骤!NetworkX 提供了 Dinitz 算法的实现:nx.flow.dinitz。nx.flow.dinitz 除了上述描述的功能外,还包括其他几个特性。例如,cutoff 关键字参数可用于在达到所需流值时提前终止 Dinitz 算法。
让我们在我们的示例网络 G 上尝试 NetworkX 的 Dinitz 算法实现。
# 要寻找的最大流值。注意最后的 `None` 值,表示算法应运行至完成,找到真正的最大流
cutoff_list = [5, 10, 15, 20, 25, 30, 35, None]
fig, axes = plt.subplots(4, 2, figsize=(20, 30))
node_colors = ["skyblue" if n in {"s", "t"} else "lightgray" for n in G.nodes]
for cutoff, ax in zip(cutoff_list, axes.ravel()):
# 使用 cutoff 值计算最大流
R = nx.flow.dinitz(G, s="s", t="t", capacity="capacity", cutoff=cutoff)
# 根据边是否有非零流值来着色和标记边
edge_colors = ["lightgray" if R[u][v]["flow"] == 0 else "black" for u, v in G.edges]
edge_labels = {
(u, v): f"{R[u][v]['flow']}/{G[u][v]['capacity']}"
for u, v in G.edges
if R[u][v]["flow"] != 0
}
# 绘制网络
nx.draw_networkx_nodes(G, pos=pos, ax=ax, node_size=500, node_color=node_colors)
nx.draw_networkx_labels(G, pos=pos, ax=ax, font_size=14)
nx.draw_networkx_edges(G, pos=pos, ax=ax, edge_color=edge_colors)
nx.draw_networkx_edge_labels(
G, pos=pos, ax=ax, edge_labels=edge_labels, font_size=14
)
ax.set_title(
f"Cutoff value = {cutoff}; Max Flow = {R.graph['flow_value']}",
size=22,
)
fig.tight_layout()
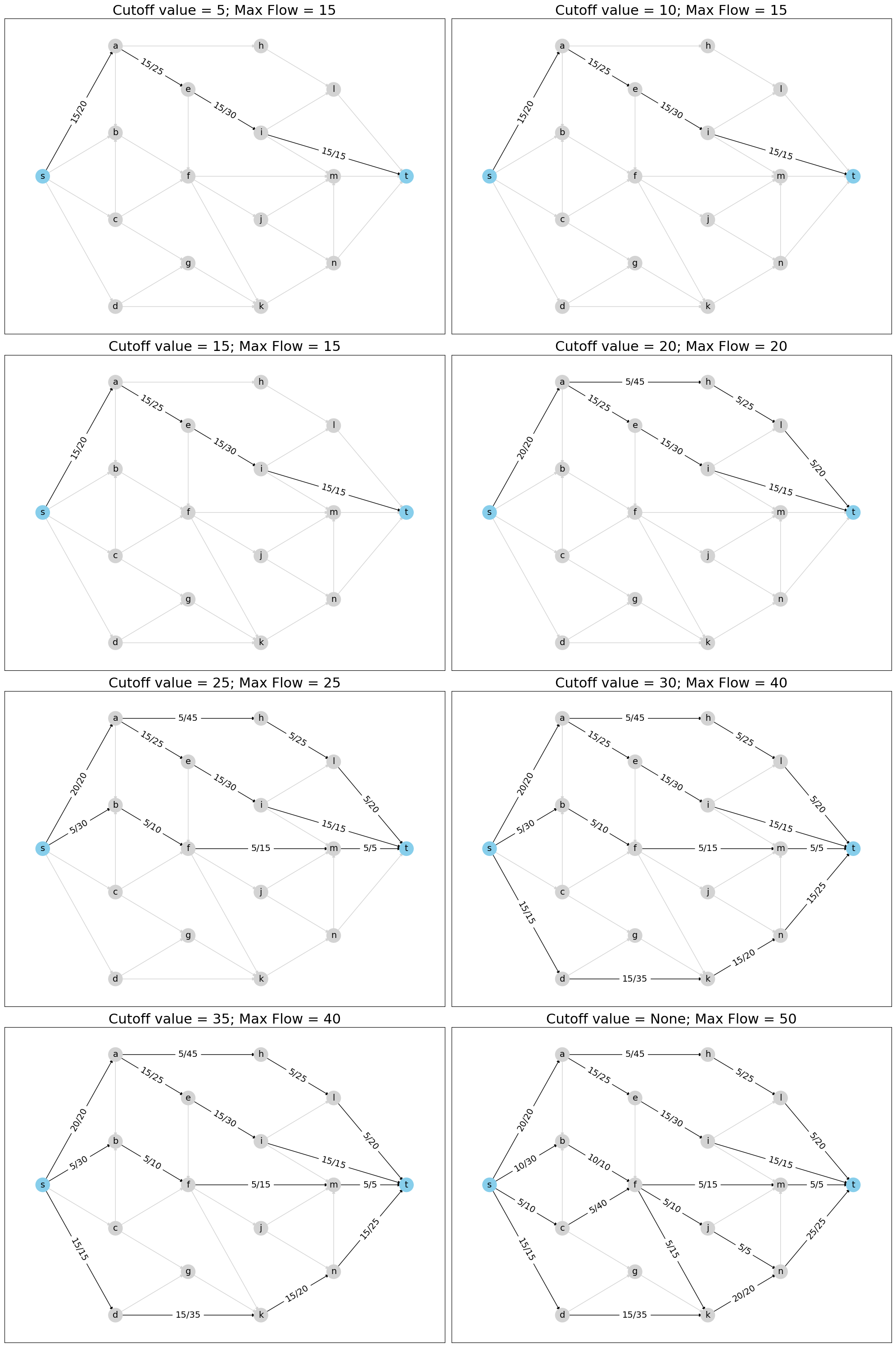
注意:如果找到的最大流已超过 cutoff 值,则停止迭代。
应用#
还有许多其他问题可以简化为最大流问题,例如:
以及其他许多问题。
需要注意的是,尽管 Dinitz 算法在 \(O(n^2m)\) 强多项式时间内运行,即它不依赖于流值。值得注意的是,它在二分图上的性能特别快,为 \(O(\sqrt n m)\) 时间,其中 \(n = |V|\) 和 \(m = |E|\)。
让我们考虑一个从仓库通过一些中间运输点向客户运送包裹的例子,并且我们每天只能通过一个中间运输点运送有限数量的包裹。
那么如何分配中间运输点给客户,以便每天运送最多的包裹呢?
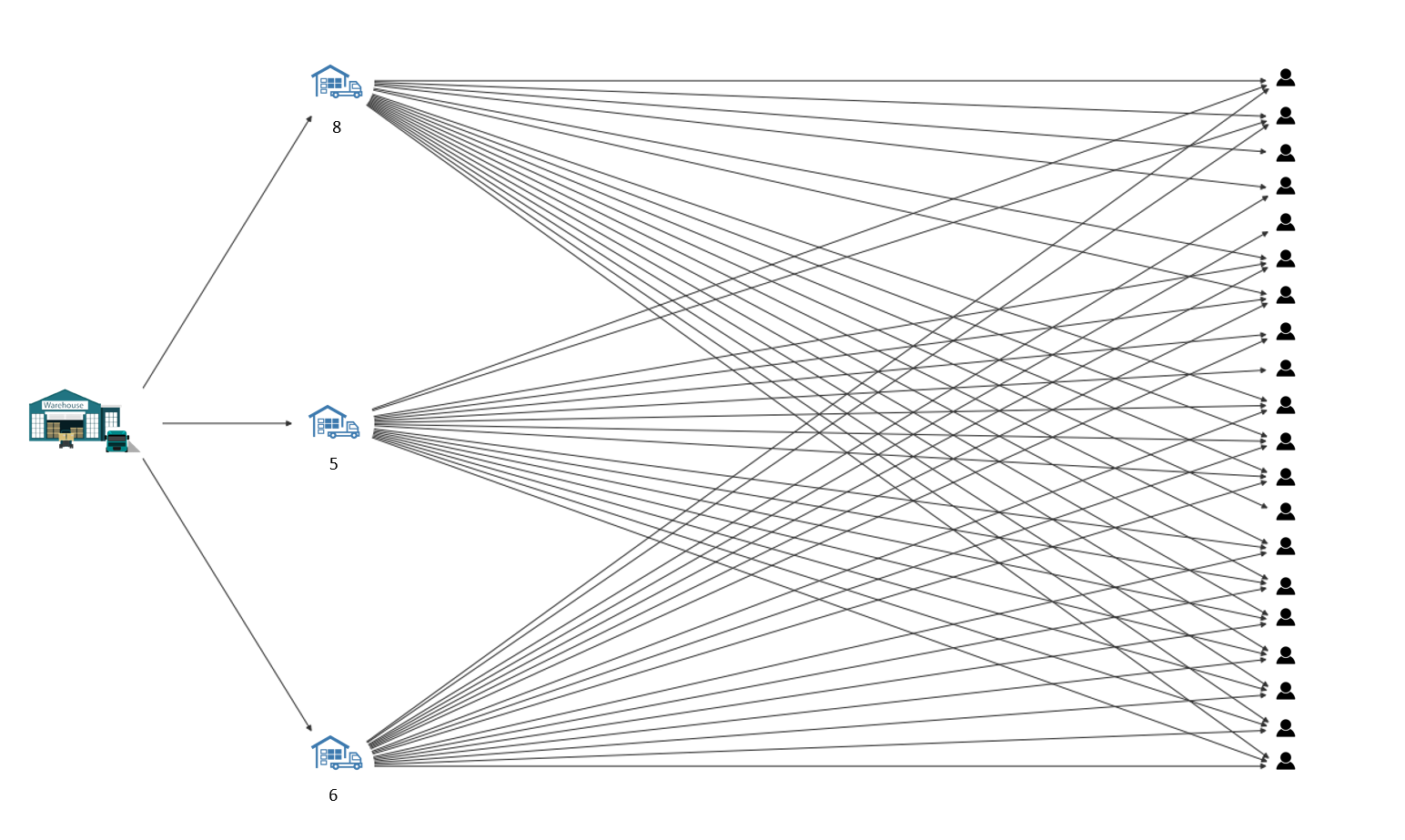
每个中间运输点下方的数字表示它每天可以运送的最大数量,如果边连接了一个中间运输点和客户,那么我们可以从该运输点向该客户发送包裹。
注意,仓库节点命名为 \(W\),中间运输点为 \(lw1, lw2, lw3\),客户为 \(c1,c2...c20\)。
# 加载数据
B = nx.read_gml("data/shipping_graph.gml")
pos = {k: np.asarray(v) for k, v in B.nodes(data="pos")}
# 绘制加载的图
node_colors = ["skyblue" if u == "W" else "lightgray" for u in B.nodes]
plt.figure(figsize=(20, 10))
nx.draw(
B, pos=pos, node_color=node_colors, with_labels=True, arrowsize=10, node_size=800
)
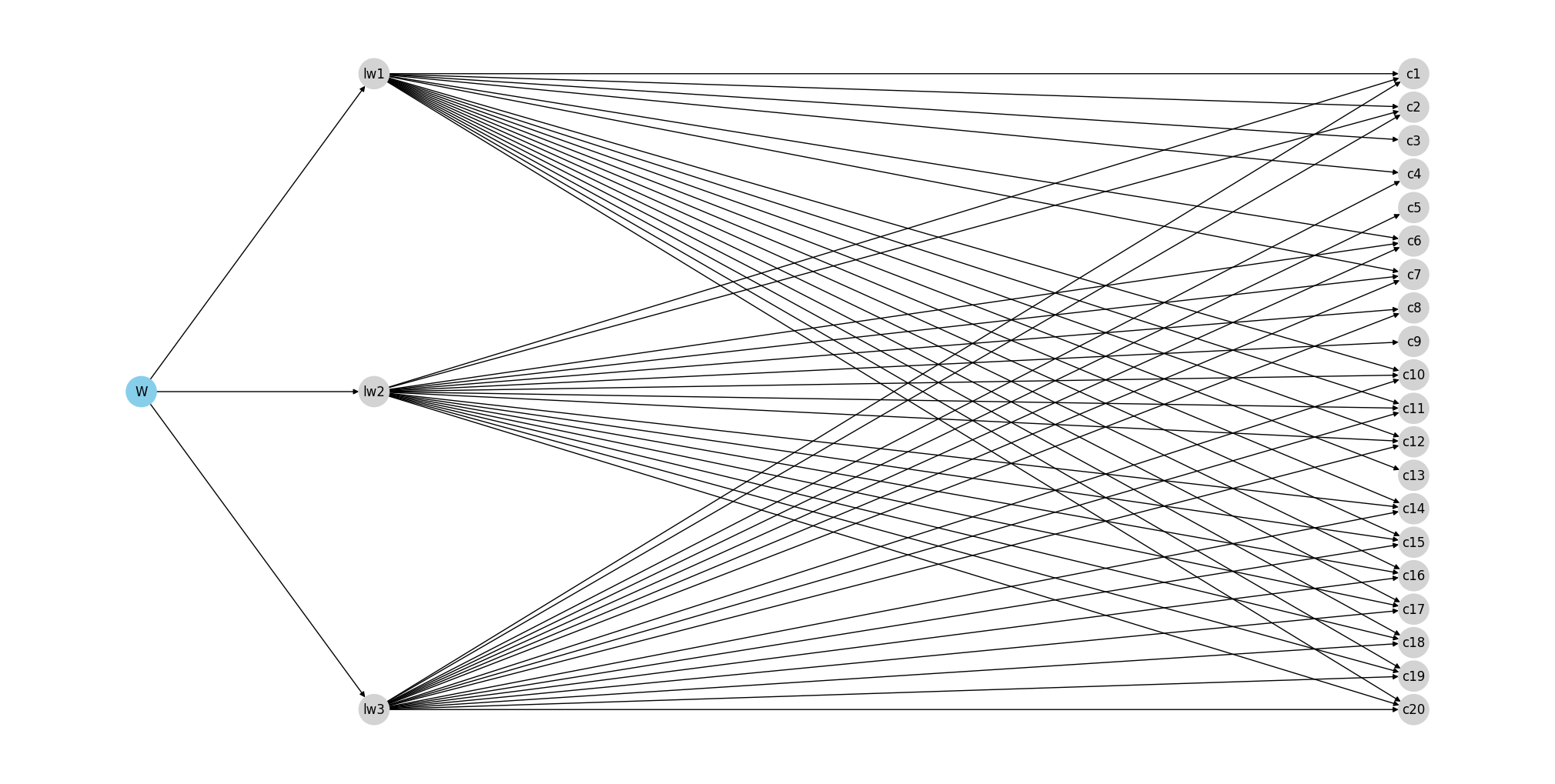
# 最大运输容量
{u: B.nodes[u]["maximum_shippings"] for u in ["lw1", "lw2", "lw3"]}
{'lw1': 8, 'lw2': 5, 'lw3': 6}
让我们添加一个表示最终汇点的伪节点 \(T\),并从 \(ci \to T\),\(i\in\{1,2,...,20\}\)。需要注意的是,超过任何一天 \(lwi\)(\(i\in\{1,2,3\}\))能运送的最大包裹数量都是无用的。因此,我们可以将这一最大运送数量转移到边 \(W\to lwi\)(\(i\in\{1,2,3\}\))的最大容量上,而对于所有其他边,我们可以将其容量设为 1,因为我们每个客户只需要一次运送。
注意:我们已经在前面的步骤中为节点 \(T\) 分配了位置,该位置已加载到 pos 中。
# 添加节点 T 以及从 c1, c2, ..., c20 到 T 的边
B.add_node("T")
pos["T"] = np.array([0.97, 0.0])
B.add_edges_from((f"c{i}", "T") for i in range(1, 21))
# 添加从 W 到 lw1, lw2, lw3 的容量
for u in ["lw1", "lw2", "lw3"]:
B["W"][u]["capacity"] = B.nodes[u]["maximum_shippings"]
# 为所有其他边(除从 W 出发的边)添加容量为 1
for u, v in B.edges:
if u != "W":
B[u][v]["capacity"] = 1
# 根据节点类型为其分配颜色和标签
node_colors = ["skyblue" if u in {"W", "T"} else "lightgray" for u in B.nodes]
# 计算最大流,使用截止值
R = nx.flow.dinitz(B, s="W", t="T", capacity="capacity")
# 根据边的流量值是否为零来为其着色和标记
edge_colors = ["0.8" if R[u][v]["flow"] == 0 else "0" for u, v in B.edges]
# 绘制网络
plt.figure(figsize=(20, 10))
nx.draw_networkx_nodes(B, pos=pos, node_size=400, node_color=node_colors)
nx.draw_networkx_labels(B, pos=pos, font_size=8)
nx.draw_networkx_edges(B, pos=pos, edge_color=edge_colors)
plt.title(f"最大流 = {R.graph['flow_value']}", size=12)
plt.axis("off")
plt.show()
/usr/local/lib/python3.11/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 26368 (\N{CJK UNIFIED IDEOGRAPH-6700}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/usr/local/lib/python3.11/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 22823 (\N{CJK UNIFIED IDEOGRAPH-5927}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/usr/local/lib/python3.11/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 27969 (\N{CJK UNIFIED IDEOGRAPH-6D41}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
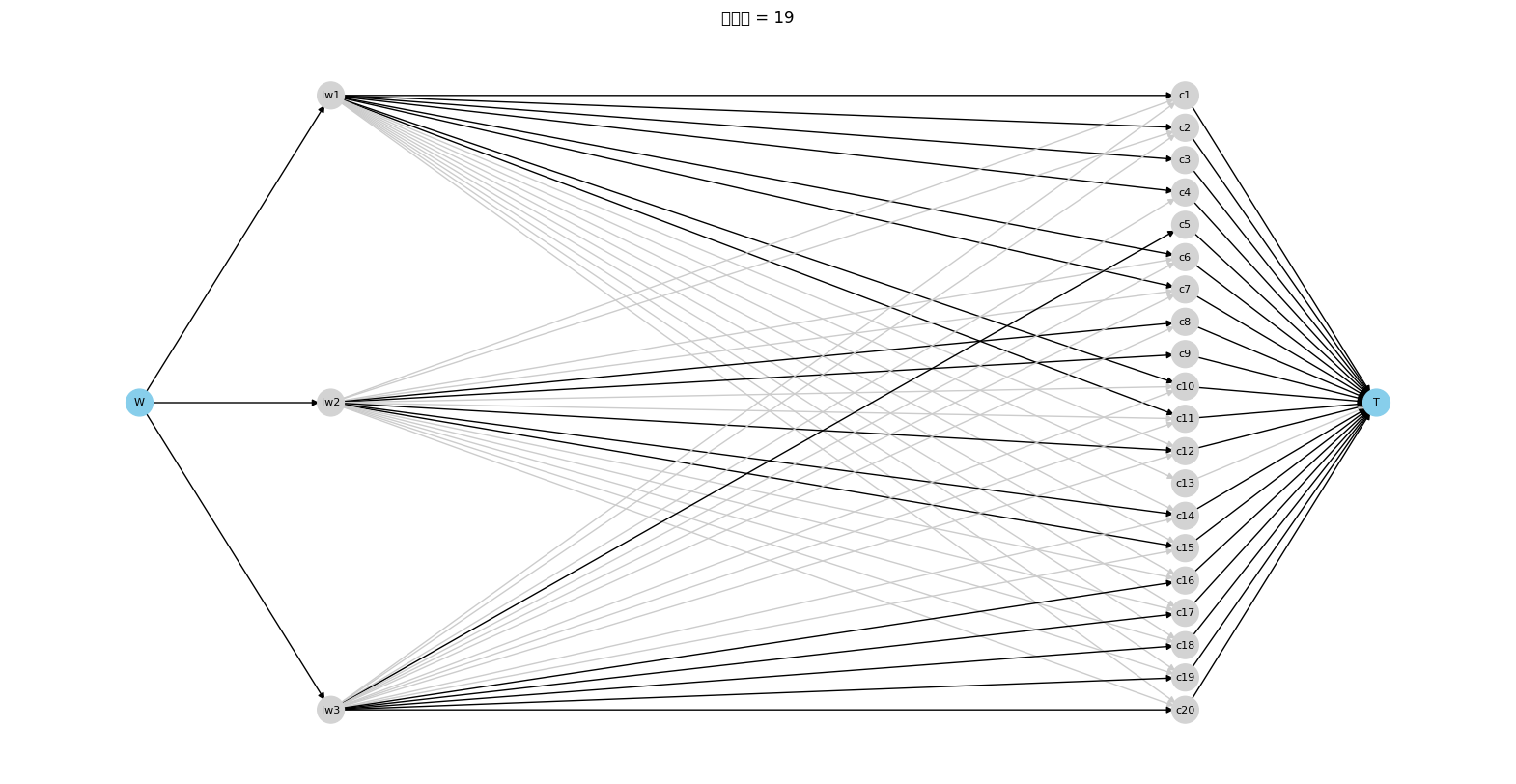
上述结果展示了一天中中间运输点和客户之间的匹配,这种匹配实现了最大运送量。