Delaunay#
- class scipy.spatial.Delaunay(points, furthest_site=False, incremental=False, qhull_options=None)#
N 维中的 Delaunay 三角剖分。
Added in version 0.9.
- 参数:
- 点浮点数的 ndarray,形状为 (npoints, ndim)
用于三角剖分的点坐标
- furthest_sitebool, 可选
是否计算最远点Delaunay三角剖分。默认值:False
Added in version 0.12.0.
- 增量bool, 可选
允许逐步添加新点。这会占用一些额外资源。
- qhull_optionsstr, 可选
传递给 Qhull 的额外选项。详情请参阅 Qhull 手册。选项 “Qt” 始终启用。默认值:ndim > 4 时为 “Qbb Qc Qz Qx Q12”,否则为 “Qbb Qc Qz Q12”。增量模式省略 “Qz”。
Added in version 0.12.0.
- 属性:
- 点双精度 ndarray,形状为 (npoints, ndim)
输入点的坐标。
- 单纯形整数 ndarray,形状为 (nsimplex, ndim+1)
形成三角剖分中单纯形的点的索引。对于2-D,点的方向是逆时针的。
- 邻居整数 ndarray,形状为 (nsimplex, ndim+1)
每个单纯形的邻居单纯形的索引。第 k 个邻居与第 k 个顶点相对。对于边界上的单纯形,-1 表示没有邻居。
- 方程式双精度 ndarray,形状为 (nsimplex, ndim+2)
[normal, offset] 形成抛物面上面的面的超平面方程(更多信息请参见 Qhull 文档)。
- 抛物面缩放, 抛物面平移浮动
额外抛物面维度的缩放和平移(更多信息请参见 Qhull 文档)。
transform双精度 ndarray,形状为 (nsimplex, ndim+1, ndim)从
x到重心坐标c的仿射变换。vertex_to_simplex整数 ndarray,形状为 (npoints,)查找数组,从一个顶点,到它所属的某个单纯形。
convex_hullint 类型的 ndarray,形状为 (nfaces, ndim)形成点集凸包的面片的顶点。
- 共面int 类型的 ndarray,形状为 (ncoplanar, 3)
共面点的索引以及对应的最近面的索引和最近顶点的索引。共面点是由于数值精度问题而未被包含在三角剖分中的输入点。
如果未指定选项“Qc”,则不计算此列表。
Added in version 0.12.0.
vertex_neighbor_vertices两个整数 ndarray 的元组;(indptr, indices)顶点的相邻顶点。
- furthest_site
如果这是最远点三角剖分则为True,否则为False。
Added in version 1.4.0.
方法
add_points(points[, restart])处理一组额外的新的要点。
close()完成增量处理。
find_simplex(self, xi[, bruteforce, tol])找到包含给定点的单纯形。
lift_points(self, x)提升点指向 Qhull 抛物面。
plane_distance(self, xi)计算从所有单纯形到点 xi 的超平面距离。
- Raises:
- QhullError
当 Qhull 遇到错误条件时引发,例如在未启用解决选项时的几何退化。
- ValueError
如果输入的是一个不兼容的数组,则会引发此错误。
注释
镶嵌是通过使用 Qhull 库 Qhull 库 计算的。
备注
除非你传入 Qhull 选项 “QJ”,否则 Qhull 不能保证每个输入点都出现在 Delaunay 三角剖分中。被省略的点列在 coplanar 属性中。
示例
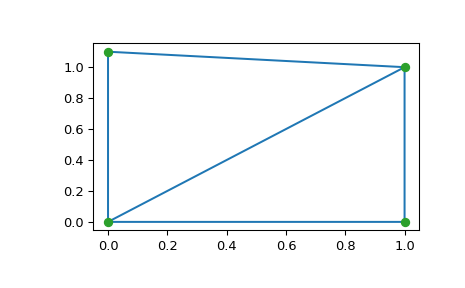
一组点的三角剖分:
>>> import numpy as np >>> points = np.array([[0, 0], [0, 1.1], [1, 0], [1, 1]]) >>> from scipy.spatial import Delaunay >>> tri = Delaunay(points)
我们可以绘制它:
>>> import matplotlib.pyplot as plt >>> plt.triplot(points[:,0], points[:,1], tri.simplices) >>> plt.plot(points[:,0], points[:,1], 'o') >>> plt.show()
形成三角剖分的两个三角形的点索引和坐标:
>>> tri.simplices array([[2, 3, 0], # may vary [3, 1, 0]], dtype=int32)
请注意,根据舍入误差的处理方式,单纯形的顺序可能与上述不同。
>>> points[tri.simplices] array([[[ 1. , 0. ], # may vary [ 1. , 1. ], [ 0. , 0. ]], [[ 1. , 1. ], [ 0. , 1.1], [ 0. , 0. ]]])
三角形 0 是三角形 1 的唯一邻居,并且它与三角形 1 的顶点 1 相对:
>>> tri.neighbors[1] array([-1, 0, -1], dtype=int32) >>> points[tri.simplices[1,1]] array([ 0. , 1.1])
我们可以找出哪些三角形的点在其中:
>>> p = np.array([(0.1, 0.2), (1.5, 0.5), (0.5, 1.05)]) >>> tri.find_simplex(p) array([ 1, -1, 1], dtype=int32)
数组中返回的整数是对应点所在的单纯形的索引。如果返回 -1,则该点不在任何单纯形中。请注意,以下示例中的快捷方式仅对有效点正确工作,因为无效点会导致返回 -1,而 -1 本身是列表中最后一个单纯形的有效索引。
>>> p_valids = np.array([(0.1, 0.2), (0.5, 1.05)]) >>> tri.simplices[tri.find_simplex(p_valids)] array([[3, 1, 0], # may vary [3, 1, 0]], dtype=int32)
我们也可以为这些点计算三角形1中的重心坐标:
>>> b = tri.transform[1,:2].dot(np.transpose(p - tri.transform[1,2])) >>> np.c_[np.transpose(b), 1 - b.sum(axis=0)] array([[ 0.1 , 0.09090909, 0.80909091], [ 1.5 , -0.90909091, 0.40909091], [ 0.5 , 0.5 , 0. ]])
第一个点的坐标均为正值,这意味着它确实位于三角形内部。第三个点在一条边上,因此其第三个坐标为空。