shmap (shard_map) 用于简单的按设备代码#
sholto@, sharadmv@, jekbradbury@, zhangqiaorjc@, mattjj@
2023年1月
动机#
JAX 支持两种多设备编程的思想:
编译器,接管方向盘! 让编译器自动在设备上分区批量数组函数。
让我直接表达我的意思,该死! 给我每个设备的代码和明确的通信集合。
我们需要为两者都提供优秀的API,并且它们不应是互斥的替代方案,而是需要相互组合。
使用 pjit(现在只是 jit),我们为第一所学校提供了一个下一代API。但我们还没有完全升级第二所学校。pmap遵循第二所学校,但随着时间的推移,我们发现它有致命缺陷。xmap解决了这些缺陷,但它并没有完全给我们提供每个设备的形状,而且还包含了一些其他的大想法。同时,新的需求出现了,比如在高效扩展Transformer推理中,需要每个设备的显式集体编程。
我们可以用 shmap 升级第二所学校。shmap 是:
一个简单的多设备并行API,允许我们编写每个设备的代码,并明确使用集合操作,其中逻辑形状与每个设备的物理缓冲区形状匹配,并且集合操作完全对应于跨设备的通信。
xmap的一个特化版本,具有缩减的功能和一些调整;XLA SPMD 分区器的 ‘手动’ 模式的相当直接的表面化;
一个有趣且容易发音的Seussian名字,可以代表
shard_map、shpecialized_xmap、sholto_map或sharad_map。
对于 pjit 用户,shmap 是一个补充工具。它可以在 pjit 计算中使用,暂时进入“手动集体”模式,就像从编译器的自动分区中逃脱一样。这样,用户可以在大部分代码中获得 pjit 的便利性和熟悉的仅 NumPy 编程模型,同时还能在需要的地方使用 shmap 手动优化集体通信。这是两全其美!
对于 pmap 用户,shmap 是一个严格的升级。它在表达能力、性能以及与其他 JAX API 的组合性方面更加出色,同时不会使基本的批量数据并行变得更加困难。
关于实际使用的更多信息,您可以跳转到 何时应该使用 shmap 以及何时应该使用 pjit?。如果您想知道为什么我们需要一个新东西,或者 pmap 存在什么问题,请跳转到 为什么 pmap 或 xmap 不能解决这个问题?。或者继续阅读下一节,查看一些 shmap 示例和 API 规范。
那么,让我们看看 shmap!#
TL;DR 示例(随后有更详细的解释)#
Sho shick:
from functools import partial
import numpy as np
import jax
import jax.numpy as jnp
from jax.sharding import Mesh, PartitionSpec as P
from jax.experimental import mesh_utils
from jax.experimental.shard_map import shard_map
devices = mesh_utils.create_device_mesh((4, 2))
mesh = Mesh(devices, axis_names=('i', 'j'))
a = jnp.arange( 8 * 16.).reshape(8, 16)
b = jnp.arange(16 * 32.).reshape(16, 32)
@partial(shard_map, mesh=mesh, in_specs=(P('i', 'j'), P('j', None)),
out_specs=P('i', None))
def matmul_basic(a_block, b_block):
# a_block: f32[2, 8]
# b_block: f32[8, 32]
z_partialsum = jnp.dot(a_block, b_block)
z_block = jax.lax.psum(z_partialsum, 'j')
return z_block
c = matmul_basic(a, b) # c: f32[8, 32]
注意:
不需要嵌套(或
axis_index_groups)来处理多个并行轴,不同于pmap;与
pmap和 hard-xmap不同,调用者中没有重塑操作,并且逻辑形状对应于每个设备的物理形状,这与(非硬)xmap不同;通过使用
mesh实现精确的设备布局控制,不同于pmap;逻辑和物理轴名只有一组,不像
xmap;结果是一个
jax.Array,它可以高效地传递给pjit,不像pmap;这段相同的代码在
pjit/jit内部高效运行,不同于pmap;这段代码是急切执行的,因此我们可以在中间使用
pdb并打印值,这与xmap当前的实现不同(尽管按照设计,xmap在没有顺序调度的情况下原则上也可以急切执行)。
这里有一个完全分片结果的矩阵乘法变体:
@partial(shard_map, mesh=mesh, in_specs=(P('i', 'j'), P('j', None)),
out_specs=P('i', 'j'))
def matmul_reduce_scatter(a_block, b_block):
# c_partialsum: f32[8/X, 32]
c_partialsum = jnp.matmul(a_block, b_block)
# c_block: f32[8/X, 32/Y]
c_block = jax.lax.psum_scatter(c_partialsum, 'j', scatter_dimension=1, tiled=True)
return c_block
c = matmul_reduce_scatter(a, b)
慢下来,从基础开始!#
数组轴上的秩减少映射与秩保持映射#
我们可以将 pmap(以及 vmap 和 xmap)视为沿着一个轴对每个数组输入进行解堆叠(例如,将一个2D矩阵解包为其1D行),将其主体函数应用于每个部分,并将结果重新堆叠在一起,至少在不涉及集体操作时:
pmap(f, in_axes=[0], out_axes=0)(xs) == jnp.stack([f(x) for x in xs])
例如,如果 xs 的形状是 f32[8,5],那么每个 x 的形状是 f32[5],并且如果每个 f(x) 的形状是 f32[3,7],那么最终堆叠的结果 pmap(f)(xs) 的形状是 f32[8,3,7]。也就是说,函数体 f 的每次应用都将比 pmap(f) 的相应参数少一个轴的输入作为参数。我们可以说这些是带有输入/输出解堆叠/堆叠的 降秩映射。
f 的逻辑应用次数由被映射的输入轴的大小决定:例如,如果我们映射一个大小为8的输入轴,从语义上我们得到8次函数的逻辑应用,这些应用对于 pmap 总是对应于8个物理设备进行计算。
相比之下,shmap 没有这种降低秩的行为。相反,我们可以将其视为沿输入轴切片(或“解连接”)为块,应用主体函数,然后将结果连接回一起(同样,当不涉及集体操作时):
devices = np.array(jax.devices()[:4])
m = Mesh(devices, ('i',)) # mesh.shape['i'] = 4
shard_map(f, m, in_specs=P('i'), out_specs=P('i'))(y)
==
jnp.concatenate([f(y_blk) for y_blk in jnp.split(y, 4)])
回想一下,jnp.split 将其输入分割成相同秩的等大小块,因此在上面的例子中,如果 y 的形状是 f32[8,5],那么每个 y_blk 的形状是 f32[2,5],如果每个 f(y_blk) 的形状是 f32[3,7],那么最终连接的结果 shard_map(f, ...)(y) 的形状是 f32[12,7]。所以 shmap (shard_map) 映射在其输入的分片或块上。我们可以说它是一个 保持秩的映射,具有对其输入/输出的解连接/连接操作。
f 的逻辑应用数量由网格大小决定,而不是由任何输入轴大小决定:例如,如果我们有一个总大小为4的网格(即在4个设备上),那么从语义上我们得到函数的4个逻辑应用,对应于4个物理计算它们的设备。
控制每个输入如何被分割(未连接)和用 in_specs 平铺#
每个 in_specs 通过使用 PartitionSpec 按名称识别输入数组的一些轴与网格轴的对应关系,表示如何将该输入分割(或解连接)为应用主体函数的块。这种识别决定了分片大小;当输入轴与网格轴对应时,输入沿该逻辑轴被分割(解连接)为与相应网格轴大小相等的若干部分。(如果相应的网格轴大小不能均匀地分割输入数组轴大小,则会出错。)如果输入的 pspec 没有提到网格轴名称,则不会在该网格轴上进行分割。例如:
devices = np.array(jax.devices())
m = Mesh(devices.reshape(4, 2), ('i', 'j'))
@partial(shard_map, mesh=m, in_specs=P('i', None), out_specs=P('i', 'j'))
def f1(x_block):
print(x_block.shape)
return x_block
x1 = np.arange(12 * 12).reshape(12, 12)
y = f1(x1) # prints (3,12)
在这里,因为输入的 pspec 没有提到网格轴名称 'j',所以没有输入数组的轴被分割到该网格轴上;同样,因为输入数组的第二个轴没有与(因此也没有被分割到)任何网格轴关联,所以应用 f1 时,在该轴上可以看到输入的完整视图。
当输入的pspec中没有提到网格轴时,我们总是可以重写为一个效率较低的程序,其中所有网格轴都被提及,但调用者执行 jnp.tile,例如:
@partial(shard_map, mesh=m, in_specs=P('i', 'j'), out_specs=P('i', 'j'))
def f2(x_block):
print(x_block.shape)
return x_block
x = np.arange(12 * 12).reshape(12, 12)
x_ = jnp.tile(x, (1, mesh.axis_size['j'])) # x_ has shape (12, 24)
y = f2(x_) # prints (3,12), and f1(x) == f2(x_)
换句话说,因为每个输入的 pspec 可以提到每个网格轴名称零次或一次,而不是必须提到每个名称恰好一次,我们可以说除了 jnp.split 内置于其输入之外,shard_map 还内置了一个 jnp.tile,至少在逻辑上是这样(尽管根据参数的物理分片布局,可能不需要实际执行平铺)。要使用的平铺不是唯一的;我们也可以沿着第一个轴平铺,并使用 pspec P(('j', 'i'), None)。
物理数据移动在输入上是可能的,因为每个设备都需要有一份适当的数据副本。
通过 out_specs 控制每个输出的组装方式,包括连接、块转置和解块。#
类似于输入端,每个 out_specs 通过名称识别输出数组的一些轴与网格轴的对应关系,表示如何将输出块(每个体函数应用一个,或等效地每个物理设备一个)重新组合以形成最终的输出值。例如,在上述 f1 和 f2 示例中,out_specs 指示我们应该沿着两个轴将块结果连接在一起,从而在两种情况下形成形状为 (12,24) 的数组 y。(如果体函数的输出形状,即输出块的形状,其秩对于相应的输出 pspec 描述的连接来说太小,则会出现错误。)
当网格轴名称未在输出 pspec 中提及,它表示一个 非平铺:当用户编写一个未提及某个网格轴名称的输出 pspec 时,他们承诺输出块在该网格轴上是相等的,因此在该轴上只使用一个块(而不是将该轴上的所有块连接在一起)。例如,使用与上面相同的网格:
x = jnp.array([[3.]])
z = shard_map(lambda: x, mesh=m, in_specs=(), out_specs=P('i', 'j'))()
print(z) # prints the same as jnp.tile(x, (4, 2))
z = shard_map(lambda: x, mesh=m, in_specs=(), out_specs=P('i', None))()
print(z) # prints the same as jnp.tile(x, (4, 1)), or just jnp.tile(x, (4,))
z = shard_map(lambda: x, mesh=m, in_specs=(), out_specs=P(None, None))()
print(z) # prints the same as jnp.tile(x, (1, 1)), or just x
注意,主体函数关闭一个数组值等同于将其作为参数传递,并带有相应的输入 pspec P(None, None)。作为另一个例子,更接近于上述其他例子:
@partial(shard_map, mesh=m, in_specs=P('i', 'j'), out_specs=P('i', None))
def f3(x_block):
return jax.lax.psum(x_block, 'j')
x = np.arange(12 * 12).reshape(12, 12)
y3 = f3(x)
print(y3.shape) # (12,6)
请注意,结果的第二个轴大小为6,是输入的第二个轴大小的一半。在这种情况下,由于集体 psum 的存在,未提及网格轴名称 'j' 在输出 pspec 中表示的未平铺是安全的,这确保了每个输出块在相应的网格轴上是相等的。以下是另外两个例子,我们改变在输出 pspec 中提及的网格轴:
@partial(shard_map, mesh=m, in_specs=P('i', 'j'), out_specs=P(None, 'j'))
def f4(x_block):
return jax.lax.psum(x_block, 'i')
x = np.arange(12 * 12).reshape(12, 12)
y4 = f4(x)
print(y4.shape) # (3,12)
@partial(shard_map, mesh=m, in_specs=P('i', 'j'), out_specs=P(None, None))
def f5(x_block):
return jax.lax.psum(x_block, ('i', 'j'))
y5 = f5(x)
print(y5.shape) # (3,6)
在物理方面,如果在输出pspec中不提及网格轴名称,则会从输出设备缓冲区中组装一个 Array,并在该网格轴上沿复制布局。
在运行时没有检查输出块实际上是否沿着网格轴相等,以便可以沿着该轴进行解块,或者等效地检查相应的物理缓冲区是否具有相等的值,从而可以解释为单个逻辑数组的复制布局。但是,我们可以提供一个静态检查机制,该机制会在所有可能不正确的程序上引发错误。
因为 out_specs 可以提到网格轴名称零次或一次,并且因为它们可以按任何顺序提及,我们可以说,除了其输出中内置的 jnp.concatenate 之外,shard_map 的输出还内置了无平铺和块转置。
在输出上不可能进行物理数据移动,无论输出 pspec 如何。相反,out_specs 仅编码如何将块输出组装成 Array,或者物理上如何跨设备解释缓冲区,以形成单个逻辑 Array 的物理布局。
API 规范#
from jax.sharding import Mesh
Specs = PyTree[PartitionSpec]
def shard_map(f: Callable, mesh: Mesh, in_specs: Specs, out_specs: Specs
) -> Callable:
...
哪里:
mesh编码了以数组排列的设备,并带有相关的轴名称,就像它对xmap和sharding.NamedSharding所做的那样;in_specs和out_specs是PartitionSpec,它们可以 仿射地 提及来自mesh的轴名称(不像xmap中那样使用独立的逻辑名称),分别表示输入和输出的切片/解联和联接(不像pmap和xmap那样进行解堆叠和堆叠),未提及的名称分别对应于复制和去平铺(断言-复制-所以-给我-一个-副本)。传递给
f的参数的形状与传递给shard_map-of-f的参数的形状具有相同的秩(与pmap和xmap不同,后者的秩会减少),并且f的参数的形状是根据shard_map-of-f的相应参数的形状shape和相应的PartitionSpecspec 计算得出的,大致为tuple(sz // (1 if n is None else mesh.shape[n]) for sz, n in zip(shape, spec));f的主体可以使用mesh中的名称应用集体操作。
shmap 默认是急切的,这意味着我们逐个原语地分派计算,以便用户可以在完全复制的值上使用 Python 控制流和交互式 pdb 调试来打印任何值。要分阶段输出并端到端编译一个 shmap 函数,只需在其周围放置一个 jit。一个结果是 shmap 不像 xmap 和 pmap 那样有自己的分派和编译路径;它只是 jit 路径。
当它被例如一个封闭的 jit 分阶段处理时,shmap 降低到 StableHLO 是微不足道的:它只是在输入上切换到 ‘手动 SPMD 模式’,并在输出上切换回来。(我们目前不计划支持部分手动部分自动的模式。)
与效果的交互与 pmap 相同。
与自动微分的交互也与 pmap 类似(而不是尝试 xmap 引入的新语义,对应于具有未映射的中间结果,因此 grad 的 reduce_axes 以及使 psum 转置为 pbroadcast 而不是 psum)。但它因此继承了 pmap 的一个未解决问题:在某些情况下,与其将 psum 转置为 psum,从而执行与前向传递 psum 对应的反向传递 psum,不如将反向传递 psum 移动到反向传递的其他位置,利用线性特性。许多高级 pmap 用户通过使用 custom_vjp 来实现 psum_idrev 和 id_psumrev 函数来解决这一挑战,但由于很容易意外地使这些不平衡,这种技术是一个潜在的危险。我们有一些想法如何以更安全的方式提供这种功能。
何时应该使用 shmap 以及何时应该使用 pjit?#
一种理念是:几乎总是更简单地用 jit==pjit 编写程序 — 但如果程序的某部分编译器优化得不如预期,就切换到 shmap!
一个真实的变压器示例#
事实上,我们可以使用shmap和30行Python代码实现XLA中最近引入的”集体矩阵乘法”算法的简单版本,以重叠通信和计算。该算法的基本思想可以通过一个简单的例子来理解。
假设我们要计算 C = A @ B,其中 A 在第0维度上通过1D网格进行分片,而 B 和 C 是复制的。
M, K, N = 4096, 2048, 1024
A = jnp.arange(np.prod((M, K))).reshape((M, K))
B = jnp.arange(np.prod((K, N))).reshape((K, N))
mesh = Mesh(np.array(jax.devices()), axis_names=('i'))
A_x = jax.device_put(A, NamedSharding(mesh, P('i', None)))
@jax.jit
def f(lhs, rhs):
return lhs @ rhs
C = f(A_x, B)
一个配置文件显示了在matmul开始之前,跨8个设备的阻塞式all-gather。这是次优的,因为A在非收缩维度上被分片,并且A的每个分片可以独立地与B进行matmul运算,这种分块计算可以与从另一个设备获取A的下一个分片重叠进行。
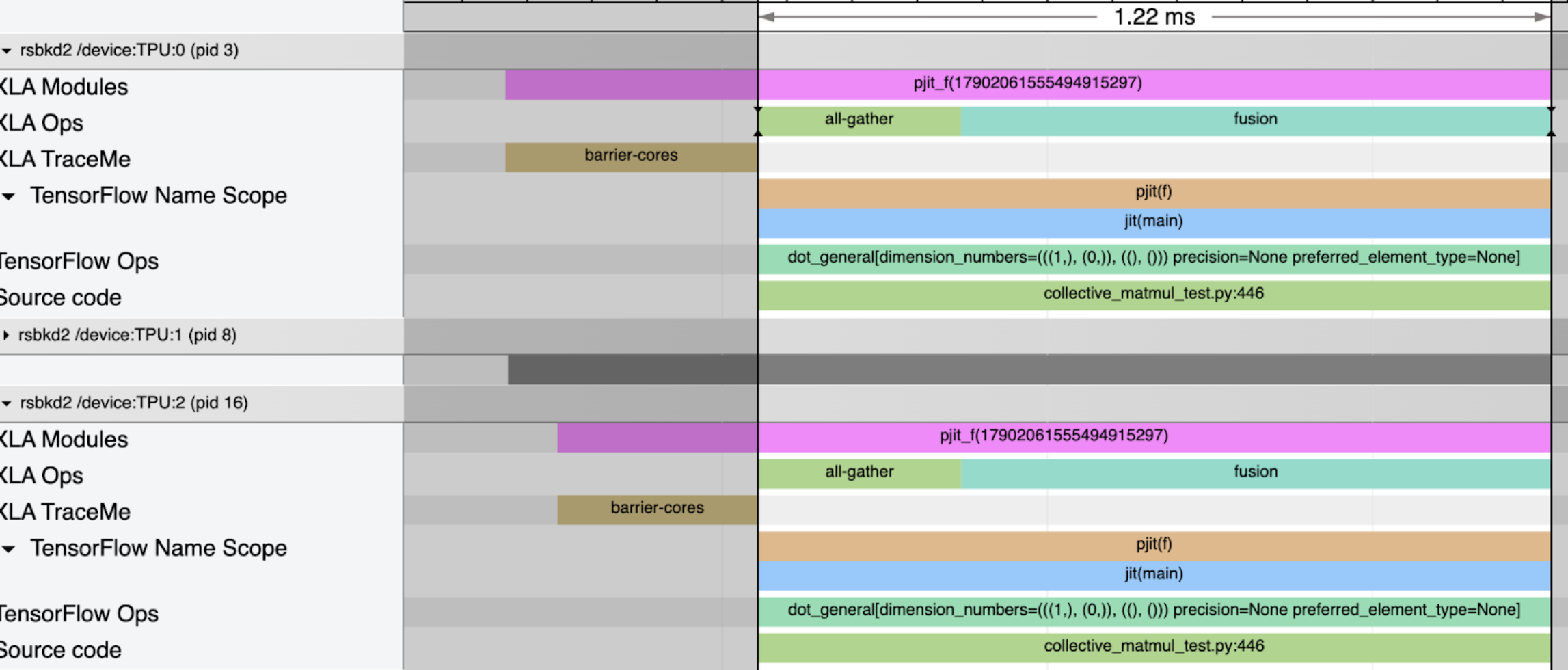
这种重叠可以通过使用 shmap 和显式集合来实现。
def collective_matmul_allgather_lhs_non_contracting(lhs, rhs):
# lhs is the looped operand; rhs is the local operand
axis_size = jax.lax.psum(1, axis_name='i')
axis_index = jax.lax.axis_index(axis_name='i')
chunk_size = lhs.shape[0]
def f(i, carrys):
accum, lhs = carrys
# matmul for a chunk
update = lhs @ rhs
# circular shift to the left
lhs = jax.lax.ppermute(
lhs,
axis_name='i',
perm=[(j, (j - 1) % axis_size) for j in range(axis_size)]
)
# device 0 computes chunks 0, 1, ...
# device 1 computes chunks 1, 2, ...
update_index = (((axis_index + i) % axis_size) * chunk_size, 0)
accum = jax.lax.dynamic_update_slice(accum, update, update_index)
return accum, lhs
accum = jnp.zeros((lhs.shape[0] * axis_size, rhs.shape[1]), dtype=lhs.dtype)
# fori_loop cause a crash: hlo_sharding.cc:817 Check failed: !IsManual()
# accum, lhs = jax.lax.fori_loop(0, axis_size - 1, f, (accum, lhs))
for i in range(0, axis_size - 1):
accum, lhs = f(i, (accum, lhs))
# compute the last chunk, without the ppermute
update = lhs @ rhs
i = axis_size - 1
update_index = (((axis_index + i) % axis_size) * chunk_size, 0)
accum = jax.lax.dynamic_update_slice(accum, update, update_index)
return accum
jit_sharded_f = jax.jit(shard_map(
collective_matmul_allgather_lhs_non_contracting, mesh,
in_specs=(P('i', None), P()), out_specs=P()))
C = jit_sharded_f(A_x, B)
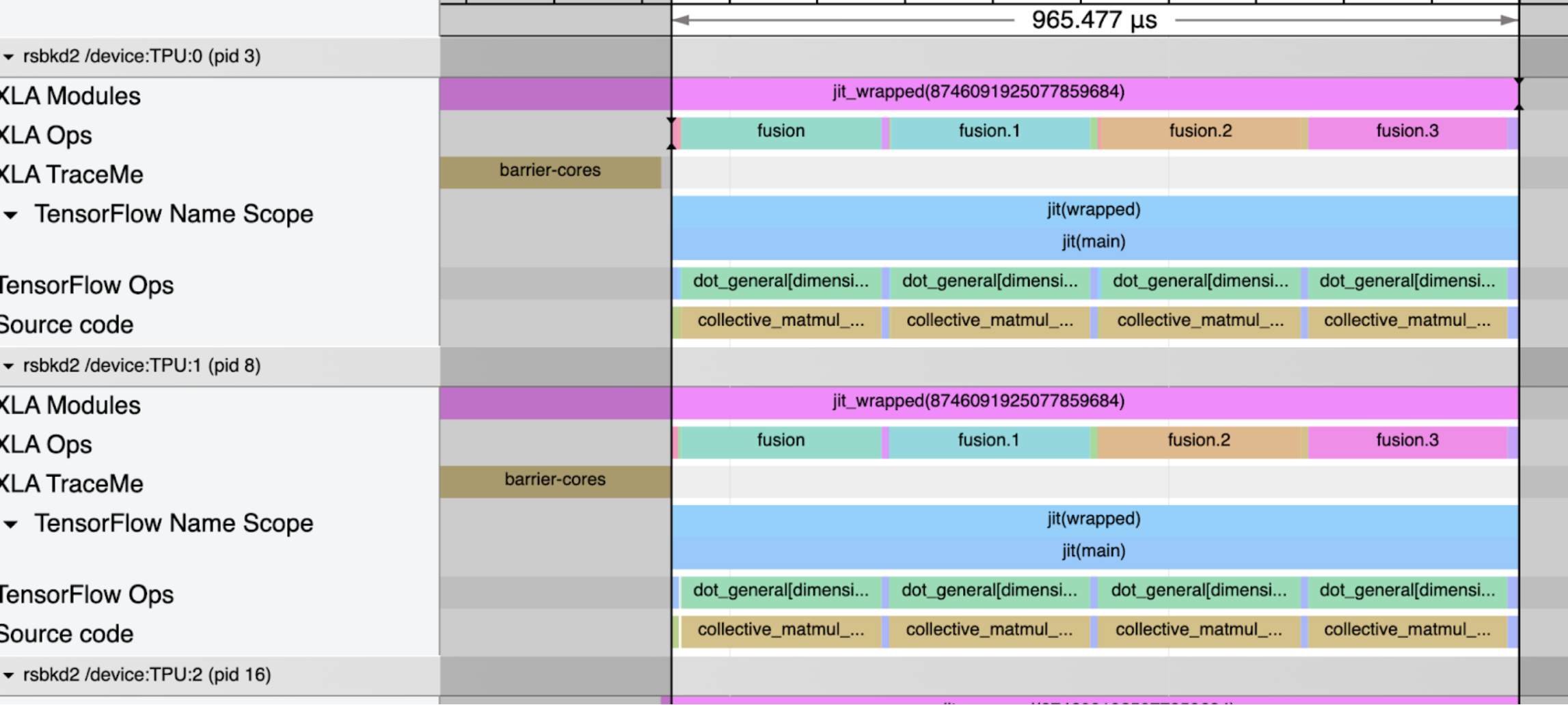
一个分析显示,all-gather 已经消失,取而代之的是与异步集体置换重叠的矩阵乘法。这个分析与集体矩阵乘法论文的结果非常吻合。
这种集体矩阵乘法技术可以用来加速变压器层中的前馈块。这通常包括两个矩阵乘法,随后是一个 ReduceScatter(用于解决从并行矩阵乘法中得到的局部和),以及前面是一个 AllGather(用于收集某些轴上的分片维度并允许局部和计算)。总的来说,一层的 ReduceScatter 和下一层的 AllGather 相当于一个 AllReduce。
在一个典型的配置文件中,两个矩阵乘法之后会跟随一个 AllReduce,并且它们不会重叠。集体矩阵乘法可以用来实现重叠,但触发困难,有最小切片大小,并且尚未覆盖所有拓扑结构、张量形状和集体矩阵乘法的变体(即延迟和吞吐量优化的变体)。在最近的一篇论文中,我们发现通过手动在 shmap 风格中实现集体矩阵乘法变体,在许多情况下可以获得约40%的增益。
但这并不总是更复杂!我们期望这是一种更自然的思考管道计算的方式,并计划很快展示一些相关的演示!
另一个现实世界的例子#
以下是 shmap 在具有二维权重收集模式的变换器层传递中可能的外观(论文,第5页的第3.2.3节):
def matmul_2D_wg_manual(xnorm, q_wi, layer):
'''Calls a custom manual implementation of matmul_reducescatter'''
# [batch, maxlen, embed.X] @ [heads.YZ, embed.X, q_wi_per_head]
# -> (matmul)
# -> [batch, maxlen, heads.YZ, q_wi_per_head]{x unreduced}
# -> (reducescatter over x into X heads, B batches)
# -> [batch, maxlen, heads.YZX, q_wi_per_head]
with jax.named_scope('q_wi'):
xnorm = intermediate_dtype(xnorm)
q_wi = matmul_reducescatter(
'bte,hed->bthd',
xnorm,
params.q_wi,
scatter_dimension=(0, 2),
axis_name='i',
layer=layer)
return q_wi
import partitioning.logical_to_physical as l2phys
def pjit_transformer_layer(
hparams: HParams, layer: int, params: weights.Layer, sin: jnp.ndarray,
cos: jnp.ndarray, kv_caches: Sequence[attention.KVCache],
x: jnp.ndarray) -> Tuple[jnp.ndarray, jnp.ndarray, jnp.ndarray]:
"""Forward pass through a single layer, returning output, K, V."""
def my_layer(t, axis=0):
"""Gets the parameters corresponding to a given layer."""
return lax.dynamic_index_in_dim(t, layer, axis=axis, keepdims=False)
# 2D: [batch.Z, time, embed.XY]
x = _with_sharding_constraint(
x, ('residual_batch', 'residual_time', 'residual_embed'))
xnorm = _layernorm(x)
# 2D: [batch, time, embed.X]
xnorm = _with_sharding_constraint(
xnorm, ('post_norm_batch', 'time', 'post_norm_embed'))
# jump into manual mode where you want to optimise
if manual:
q_wi = shard_map(matmul_2D_wg_manual, mesh
in_specs=(l2phys('post_norm_batch', 'time', 'post_norm_embed'),
l2phys('layers', 'heads', 'embed', 'q_wi_per_head')),
out_specs=l2phys('post_norm_batch', 'time', 'heads', 'q_wi_per_head'))(xnorm, q_wi, layer)
else:
q_wi = jnp.einsum('bte,hed->bthd', xnorm, my_layer(params.q_wi))
# 2D: [batch, time, heads.YZX, None]
q_wi = _with_sharding_constraint(q_wi,
('post_norm_batch', 'time', 'heads', 'qkv'))
q = q_wi[:, :, :, :hparams.qkv]
q = _rope(sin, cos, q)
# unlike in https://arxiv.org/pdf/2002.05202.pdf, PaLM implements
# swiGLU with full d_ff dimension, rather than 2/3 scaled
wi0 = q_wi[:, :, :, hparams.qkv:hparams.qkv + (hparams.ff // hparams.heads)]
wi1 = q_wi[:, :, :, hparams.qkv + (hparams.ff // hparams.heads):]
kv = jnp.einsum('bte,ezd->btzd', xnorm, my_layer(params.kv))
k = kv[:, :, 0, :hparams.qkv]
v = kv[:, :, 0, hparams.qkv:]
k = _rope(sin, cos, k)
y_att = jnp.bfloat16(attention.attend(q, k, v, kv_caches, layer))
y_mlp = special2.swish2(wi0) * wi1
# 2D: [batch, time, heads.YZX, None]
y_mlp = _with_sharding_constraint(y_mlp,
('post_norm_batch', 'time', 'heads', None))
y_fused = jnp.concatenate([y_att, y_mlp], axis=-1)
# do the second half of the mlp and the self-attn projection in parallel
y_out = jnp.einsum('bthd,hde->bte', y_fused, my_layer(params.o_wo))
# 2D: [batch.Z, time, embed.XY]
y_out = _with_sharding_constraint(
y_out, ('residual_batch', 'residual_time', 'residual_embed'))
z = y_out + x
z = _with_sharding_constraint(
z, ('residual_batch', 'residual_time', 'residual_embed'))
return z, k, v
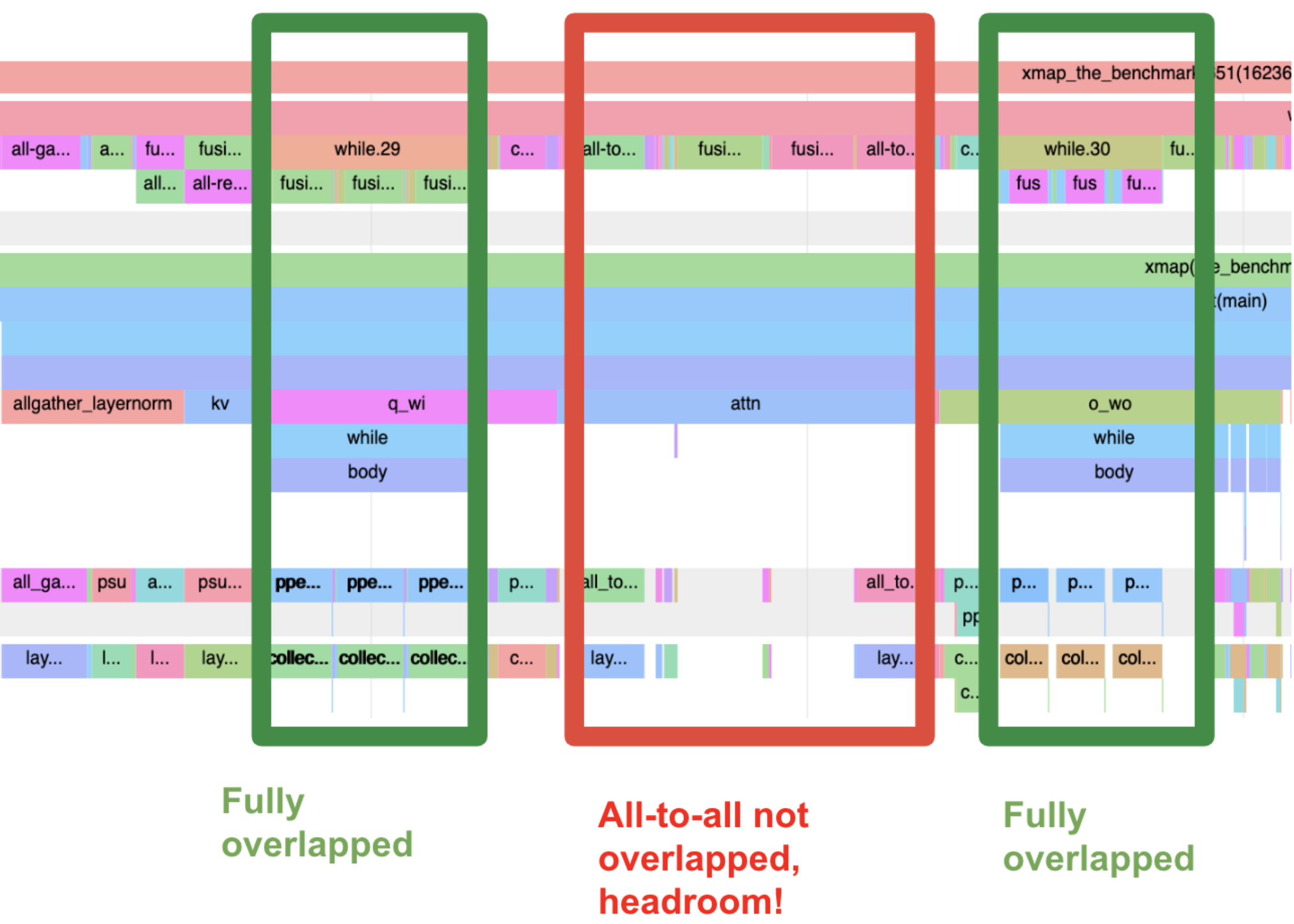
在下面的配置文件中,第一个和第二个 matmul 都被手动降低的版本所替代,其中计算(融合)与通信(ppermute)完全重叠!一个有趣的提示是,我们使用的是延迟优化的变体,即 ppmerute 像素是抖动的 — 因为在同一时间有两个使用相反 ICI 轴的 ppermute 重叠!
全对全(All-to-all)更难重叠,因此被搁置。
为什么 pmap 或 xmap 还没有解决这个问题?#
pmap 是我们第一个多设备并行 API。它遵循每设备代码和显式集合流派。但它有重大缺陷,使其不适合当今的程序:
映射多个轴需要嵌套的
pmap。 嵌套的pmap不仅写起来繁琐,而且它们使得控制(甚至预测)数据和计算的设备放置变得困难,并且难以保持数据分片(见接下来的两个要点)。今天的程序需要多轴并行。控制设备布局是不可能的。 特别是在多轴并行的情况下,程序员需要控制这些轴如何与硬件资源及其通信拓扑对齐。但是(嵌套的)
pmap不提供对映射程序实例在硬件上如何放置的控制;用户无法控制的是一个自动的设备顺序。(Gopher 使用axis_index_groups和一个单一的非嵌套pmap本质上是通过将多个并行轴扁平化为一个来绕过这一点。)jit/pjit组合性。jit-of-pmap是一个性能陷阱,嵌套pmap也是如此,例如scan-of-pmap,因为在从内部pmap返回时,分片不会被保留。为了保留分片,我们需要对 jaxprs 进行模式匹配,以确保我们处理的是完美嵌套的 pmap,或者在jit内部只有一个 pmap。此外,pjit在这里没有帮助,因为pmap针对 XLA 副本,而pjit针对 XLA SPMD 分区器,组合这两者很困难。jax.Array兼容性(因此pjit兼容性)。 由于pmap输出的分片无法表示为Shardings/OpShardings,这是由于pmap的堆叠而非连接语义,pmap计算的输出目前无法在不反弹到主机(或调度重塑计算)的情况下传递给pjit计算。多控制器语义(因此与
pjit兼容)。 多控制器的pmap将值跨控制器连接,这虽然有效,但与单控制器的pmap的堆叠语义不同。更实际的是,它排除了使用非完全可寻址的jax.Array输入和输出,就像我们在多控制器pjit中使用的那样。急切模式。 我们没有首先让
pmap急切执行,尽管我们最终(在4年多之后!)通过disable_jit()添加了急切操作,但pmap与jit融合的事实意味着它有自己的编译和调度路径(实际上有两条调度路径:在 Python 中处理Tracer,以及在 C++ 中处理原始Array输入以提高性能!),这是一个沉重的实现负担。调用者中需要的重塑。 一个典型的使用
pmap在8个设备上的用例可能看起来像是从大小为128的批次轴开始,将其重塑为大小为(8, 16)的两个轴,然后对第一个轴进行pmap操作。这些重塑操作很尴尬,编译器通常会将它们解释为复制而不是视图 — 增加了内存和时间的使用。
这些缺点在只进行批量数据并行时并不算太糟。但当涉及更多并行性时,pmap 就无法胜任了!
xmap 作为 pmap 的下一代进化版,解决了(几乎)所有这些问题。shmap 跟随 xmap 的脚步,以本质上相同的方式解决了这些问题;实际上,shmap 就像是 xmap 的一个专门子集(有些人称之为“硬 xmap”子集),并进行了一些调整。
在初始原型中,我们选择将 shmap 作为与 xmap 分开的原语来实现,因为限制其支持的功能集使得更容易专注于核心功能。例如,shmap 不允许未映射的中间步骤,这使得不必担心命名轴和自动微分之间的交互。此外,不必考虑所有功能对之间的交互,使得更容易添加超出 xmap 当前实现的能力,例如对急切模式的支持。
shmap 和 xmap 共享了降低代码的显著部分。我们未来可以考虑将两者合并,或者甚至只专注于 shmap,这取决于使用情况的发展。