DETA
该模型目前处于维护模式,我们不接受任何更改其代码的新PR。
如果您在运行此模型时遇到任何问题,请重新安装支持此模型的最后一个版本:v4.40.2。
您可以通过运行以下命令来执行此操作:pip install -U transformers==4.40.2。
概述
DETA模型由Jeffrey Ouyang-Zhang、Jang Hyun Cho、Xingyi Zhou和Philipp Krähenbühl在NMS Strikes Back中提出。 DETA(Detection Transformers with Assignment的缩写)通过用传统检测器中使用的非极大值抑制(NMS)的一对多标签分配替换一对一的双边匈牙利匹配损失,改进了Deformable DETR。这带来了高达2.5 mAP的显著提升。
论文的摘要如下:
检测变换器(DETR)通过在训练期间使用一对一二分匹配直接将查询转换为唯一对象,并实现端到端的目标检测。最近,这些模型在COCO上以无可否认的优雅超越了传统检测器。然而,它们在多个设计上与传统检测器不同,包括模型架构和训练计划,因此一对一匹配的有效性尚未完全理解。在这项工作中,我们对DETR中的一对一匈牙利匹配与传统检测器中具有非最大监督(NMS)的一对多标签分配进行了严格比较。令人惊讶的是,我们观察到在相同设置下,具有NMS的一对多分配始终优于标准的一对一匹配,显著增益高达2.5 mAP。我们使用传统基于IoU的标签分配训练的可变形DETR检测器在12个周期(1x计划)内使用ResNet50骨干网络达到了50.2 COCO mAP,在此设置下优于所有现有的传统或基于变换器的检测器。在多个数据集、计划和架构上,我们一致表明二分匹配对于高性能检测变换器是不必要的。此外,我们将检测变换器的成功归因于其富有表现力的变换器架构。
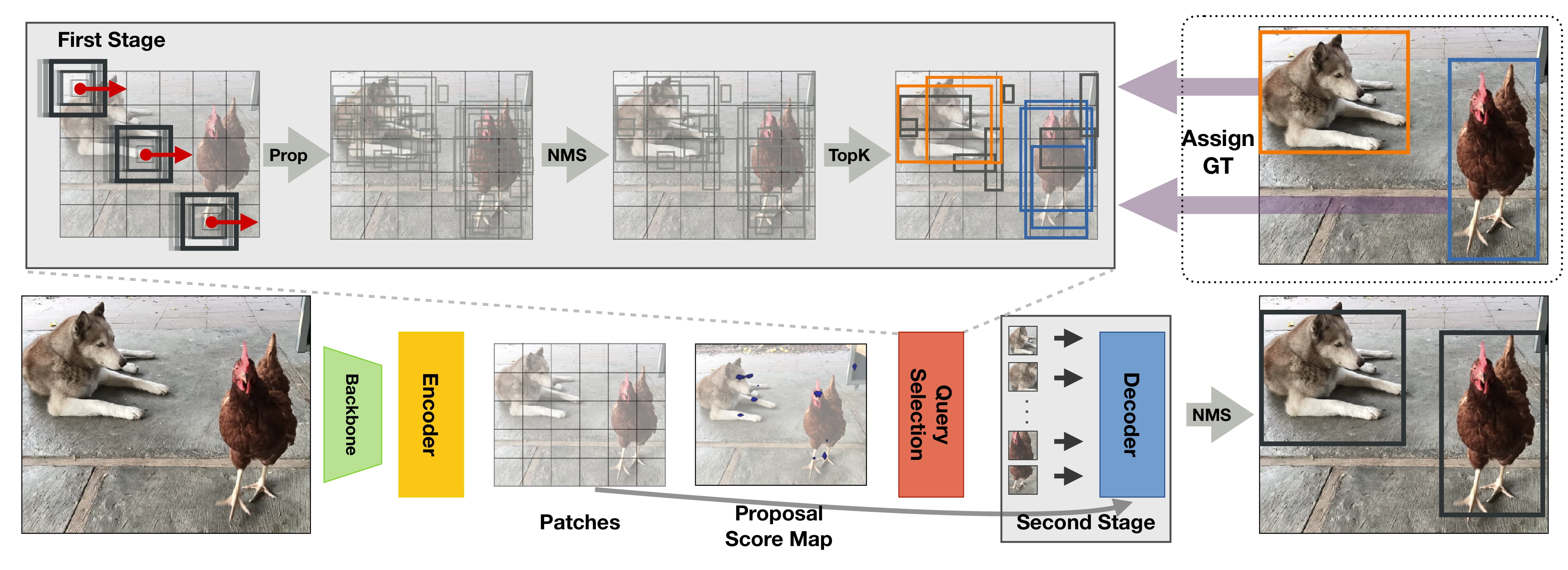 DETA overview. Taken from the original paper.
DETA overview. Taken from the original paper. 资源
一份官方的Hugging Face和社区(由🌎表示)资源列表,帮助您开始使用DETA。
- DETA的演示笔记本可以在这里找到。
- 用于微调DetaForObjectDetection的脚本,使用Trainer或Accelerate,可以在这里找到。
- 另请参阅:Object detection task guide。
如果您有兴趣提交资源以包含在此处,请随时打开一个 Pull Request,我们将进行审核!理想情况下,资源应展示一些新内容,而不是重复现有资源。
DetaConfig
类 transformers.DetaConfig
< source >( backbone_config = None backbone = None use_pretrained_backbone = False use_timm_backbone = False backbone_kwargs = None num_queries = 900 max_position_embeddings = 2048 encoder_layers = 6 encoder_ffn_dim = 2048 encoder_attention_heads = 8 decoder_layers = 6 decoder_ffn_dim = 1024 decoder_attention_heads = 8 encoder_layerdrop = 0.0 is_encoder_decoder = True activation_function = 'relu' d_model = 256 dropout = 0.1 attention_dropout = 0.0 activation_dropout = 0.0 init_std = 0.02 init_xavier_std = 1.0 return_intermediate = True auxiliary_loss = False position_embedding_type = 'sine' num_feature_levels = 5 encoder_n_points = 4 decoder_n_points = 4 two_stage = True two_stage_num_proposals = 300 with_box_refine = True assign_first_stage = True assign_second_stage = True class_cost = 1 bbox_cost = 5 giou_cost = 2 mask_loss_coefficient = 1 dice_loss_coefficient = 1 bbox_loss_coefficient = 5 giou_loss_coefficient = 2 eos_coefficient = 0.1 focal_alpha = 0.25 disable_custom_kernels = True **kwargs )
参数
- backbone_config (
PretrainedConfig或dict, 可选, 默认为ResNetConfig()) — 骨干模型的配置。 - backbone (
str, 可选) — 当backbone_config为None时使用的骨干网络名称。如果use_pretrained_backbone为True,这将从timm或transformers库加载相应的预训练权重。如果use_pretrained_backbone为False,这将加载骨干网络的配置并使用该配置初始化具有随机权重的骨干网络。 - use_pretrained_backbone (
bool, optional,False) — 是否使用预训练的权重作为骨干网络。 - use_timm_backbone (
bool, optional,False) — 是否从timm库加载backbone。如果为False,则从transformers库加载backbone。 - backbone_kwargs (
dict, 可选) — 从检查点加载时传递给AutoBackbone的关键字参数 例如{'out_indices': (0, 1, 2, 3)}。如果设置了backbone_config,则不能指定此参数。 - num_queries (
int, 可选, 默认为 900) — 对象查询的数量,即检测槽。这是 DetaModel 在单张图片中可以检测到的最大对象数量。如果two_stage设置为True,则使用two_stage_num_proposals代替。 - d_model (
int, optional, 默认为 256) — 层的维度。 - encoder_layers (
int, optional, defaults to 6) — 编码器层数. - decoder_layers (
int, optional, defaults to 6) — 解码器层数. - encoder_attention_heads (
int, optional, 默认为 8) — Transformer 编码器中每个注意力层的注意力头数。 - decoder_attention_heads (
int, optional, defaults to 8) — Transformer解码器中每个注意力层的注意力头数。 - decoder_ffn_dim (
int, optional, defaults to 2048) — 解码器中“中间”(通常称为前馈)层的维度。 - encoder_ffn_dim (
int, optional, defaults to 2048) — 解码器中“中间”(通常称为前馈)层的维度。 - activation_function (
str或function, 可选, 默认为"relu") — 编码器和池化器中的非线性激活函数(函数或字符串)。如果是字符串,支持"gelu"、"relu"、"silu"和"gelu_new"。 - dropout (
float, optional, defaults to 0.1) — 嵌入层、编码器和池化器中所有全连接层的dropout概率。 - attention_dropout (
float, optional, defaults to 0.0) — 注意力概率的丢弃比率。 - activation_dropout (
float, optional, defaults to 0.0) — 全连接层内部激活的dropout比率。 - init_std (
float, optional, 默认为 0.02) — 用于初始化所有权重矩阵的 truncated_normal_initializer 的标准差。 - init_xavier_std (
float, optional, defaults to 1) — 用于HM注意力图模块中Xavier初始化增益的缩放因子。 - encoder_layerdrop (
float, 可选, 默认为 0.0) — 编码器的LayerDrop概率。有关更多详细信息,请参阅[LayerDrop论文](见 https://arxiv.org/abs/1909.11556)。 - auxiliary_loss (
bool, 可选, 默认为False) — 是否使用辅助解码损失(每个解码器层的损失)。 - position_embedding_type (
str, 可选, 默认为"sine") — 用于图像特征之上的位置嵌入类型。可选值为"sine"或"learned". - class_cost (
float, optional, defaults to 1) — 匈牙利匹配成本中分类错误的相对权重。 - bbox_cost (
float, optional, defaults to 5) — 匈牙利匹配成本中边界框坐标的L1误差的相对权重。 - giou_cost (
float, optional, defaults to 2) — 在匈牙利匹配成本中,边界框的广义IoU损失的相对权重。 - mask_loss_coefficient (
float, optional, defaults to 1) — 全景分割损失中Focal损失的相对权重。 - dice_loss_coefficient (
float, optional, defaults to 1) — 在全景分割损失中,DICE/F-1损失的相对权重。 - bbox_loss_coefficient (
float, optional, defaults to 5) — 在目标检测损失中,L1边界框损失的相对权重。 - giou_loss_coefficient (
float, optional, defaults to 2) — 在目标检测损失中,广义IoU损失的相对权重。 - eos_coefficient (
float, optional, 默认为 0.1) — 在目标检测损失中,‘无对象’类的相对分类权重。 - num_feature_levels (
int, 可选, 默认为 5) — 输入特征级别的数量。 - encoder_n_points (
int, optional, defaults to 4) — 编码器中每个注意力头的每个特征级别中采样的键的数量。 - decoder_n_points (
int, optional, defaults to 4) — 解码器中每个注意力头在每个特征级别上采样的键的数量。 - two_stage (
bool, 可选, 默认为True) — 是否应用两阶段可变形DETR,其中区域提议也由DETA的变体生成,这些提议进一步输入解码器以进行迭代边界框细化。 - two_stage_num_proposals (
int, 可选, 默认为 300) — 在two_stage设置为True的情况下,生成的区域建议数量。 - with_box_refine (
bool, 可选, 默认为True) — 是否应用迭代边界框细化,其中每个解码器层根据前一层的预测细化边界框。 - focal_alpha (
float, optional, defaults to 0.25) — 焦点损失中的Alpha参数。 - assign_first_stage (
bool, 可选, 默认为True) — 是否将每个预测 i 分配给最高重叠的真实对象,如果重叠大于阈值 0.7。 - assign_second_stage (
bool, 可选, 默认为True) — 是否在第二阶段分配第二个分配程序,该程序紧密遵循第一阶段的分配程序。 - disable_custom_kernels (
bool, 可选, 默认为True) — 禁用自定义CUDA和CPU内核的使用。此选项对于ONNX导出是必要的,因为PyTorch ONNX导出不支持自定义内核。
这是用于存储DetaModel配置的配置类。它用于根据指定的参数实例化DETA模型,定义模型架构。使用默认值实例化配置将产生与DETA SenseTime/deformable-detr架构类似的配置。
配置对象继承自PretrainedConfig,可用于控制模型输出。阅读PretrainedConfig的文档以获取更多信息。
示例:
>>> from transformers import DetaConfig, DetaModel
>>> # Initializing a DETA SenseTime/deformable-detr style configuration
>>> configuration = DetaConfig()
>>> # Initializing a model (with random weights) from the SenseTime/deformable-detr style configuration
>>> model = DetaModel(configuration)
>>> # Accessing the model configuration
>>> configuration = model.configDetaImageProcessor
类 transformers.DetaImageProcessor
< source >( format: typing.Union[str, transformers.image_utils.AnnotationFormat] =
参数
- format (
str, optional, defaults to"coco_detection") — 注释的数据格式。可选值为“coco_detection”或“coco_panoptic”。 - do_resize (
bool, 可选, 默认为True) — 控制是否将图像的(高度,宽度)尺寸调整为指定的size。可以在preprocess方法中通过do_resize参数进行覆盖。 - size (
Dict[str, int]optional, defaults to{"shortest_edge" -- 800, "longest_edge": 1333}): Size of the image’s(height, width)dimensions after resizing. Can be overridden by thesizeparameter in thepreprocessmethod. Available options are:{"height": int, "width": int}: The image will be resized to the exact size(height, width). Do NOT keep the aspect ratio.{"shortest_edge": int, "longest_edge": int}: The image will be resized to a maximum size respecting the aspect ratio and keeping the shortest edge less or equal toshortest_edgeand the longest edge less or equal tolongest_edge.{"max_height": int, "max_width": int}: The image will be resized to the maximum size respecting the aspect ratio and keeping the height less or equal tomax_heightand the width less or equal tomax_width.
- resample (
PILImageResampling, 可选, 默认为PILImageResampling.BILINEAR) — 如果调整图像大小,则使用的重采样过滤器。 - do_rescale (
bool, 可选, 默认为True) — 控制是否通过指定的比例rescale_factor重新缩放图像。可以在preprocess方法中通过do_rescale参数覆盖此设置。 - rescale_factor (
int或float, 可选, 默认为1/255) — 如果重新缩放图像,则使用的缩放因子。可以在preprocess方法中通过rescale_factor参数覆盖此值。 - do_normalize —
控制是否对图像进行归一化。可以在
preprocess方法中通过do_normalize参数进行覆盖。 - image_mean (
float或List[float], 可选, 默认为IMAGENET_DEFAULT_MEAN) — 在标准化图像时使用的平均值。可以是单个值或一个值列表,每个通道一个值。可以在preprocess方法中通过image_mean参数覆盖此值。 - image_std (
float或List[float], 可选, 默认为IMAGENET_DEFAULT_STD) — 用于标准化图像的标准差值。可以是一个单一的值或一个值的列表,每个通道一个值。可以通过preprocess方法中的image_std参数进行覆盖。 - do_convert_annotations (
bool, 可选, 默认为True) — 控制是否将注释转换为DETR模型期望的格式。将边界框转换为格式(center_x, center_y, width, height)并在范围[0, 1]内。 可以通过preprocess方法中的do_convert_annotations参数覆盖此设置。 - do_pad (
bool, 可选, 默认为True) — 控制是否对图像进行填充。可以通过preprocess方法中的do_pad参数进行覆盖。如果为True,则会在图像的底部和右侧用零进行填充。 如果提供了pad_size,图像将被填充到指定的尺寸。 否则,图像将被填充到批次中的最大高度和宽度。 - pad_size (
Dict[str, int], 可选) — 图像填充的大小{"height": int, "width" int}。必须大于预处理中提供的任何图像大小。 如果未提供pad_size,图像将被填充到批次中最大的高度和宽度。
构建一个可变形DETR图像处理器。
预处理
< source >( images: typing.Union[ForwardRef('PIL.Image.Image'), numpy.ndarray, ForwardRef('torch.Tensor'), typing.List[ForwardRef('PIL.Image.Image')], typing.List[numpy.ndarray], typing.List[ForwardRef('torch.Tensor')]] annotations: typing.Union[typing.List[typing.Dict], typing.List[typing.List[typing.Dict]], NoneType] = None return_segmentation_masks: bool = None masks_path: typing.Union[str, pathlib.Path, NoneType] = None do_resize: typing.Optional[bool] = None size: typing.Optional[typing.Dict[str, int]] = None resample = None do_rescale: typing.Optional[bool] = None rescale_factor: typing.Union[int, float, NoneType] = None do_normalize: typing.Optional[bool] = None image_mean: typing.Union[float, typing.List[float], NoneType] = None image_std: typing.Union[float, typing.List[float], NoneType] = None do_convert_annotations: typing.Optional[bool] = None do_pad: typing.Optional[bool] = None format: typing.Union[str, transformers.image_utils.AnnotationFormat, NoneType] = None return_tensors: typing.Union[str, transformers.utils.generic.TensorType, NoneType] = None data_format: typing.Union[str, transformers.image_utils.ChannelDimension] =
参数
- 图像 (
ImageInput) — 要预处理的图像或图像批次。期望输入单个或批次的图像,像素值范围从0到255。如果传入的图像的像素值在0到1之间,请设置do_rescale=False. - annotations (
List[Dict]orList[List[Dict]], optional) — List of annotations associated with the image or batch of images. If annotation is for object detection, the annotations should be a dictionary with the following keys:- “image_id” (
int): The image id. - “annotations” (
List[Dict]): List of annotations for an image. Each annotation should be a dictionary. An image can have no annotations, in which case the list should be empty. If annotation is for segmentation, the annotations should be a dictionary with the following keys: - “image_id” (
int): The image id. - “segments_info” (
List[Dict]): List of segments for an image. Each segment should be a dictionary. An image can have no segments, in which case the list should be empty. - “file_name” (
str): The file name of the image.
- “image_id” (
- return_segmentation_masks (
bool, 可选, 默认为 self.return_segmentation_masks) — 是否返回分割掩码。 - masks_path (
strorpathlib.Path, optional) — 包含分割掩码的目录路径。 - do_resize (
bool, optional, defaults to self.do_resize) — 是否调整图像大小. - size (
Dict[str, int], optional, defaults to self.size) — Size of the image’s(height, width)dimensions after resizing. Available options are:{"height": int, "width": int}: The image will be resized to the exact size(height, width). Do NOT keep the aspect ratio.{"shortest_edge": int, "longest_edge": int}: The image will be resized to a maximum size respecting the aspect ratio and keeping the shortest edge less or equal toshortest_edgeand the longest edge less or equal tolongest_edge.{"max_height": int, "max_width": int}: The image will be resized to the maximum size respecting the aspect ratio and keeping the height less or equal tomax_heightand the width less or equal tomax_width.
- resample (
PILImageResampling, optional, defaults to self.resample) — 调整图像大小时使用的重采样过滤器。 - do_rescale (
bool, optional, defaults to self.do_rescale) — 是否对图像进行重新缩放. - rescale_factor (
float, optional, defaults to self.rescale_factor) — 在重新缩放图像时使用的重新缩放因子。 - do_normalize (
bool, optional, defaults to self.do_normalize) — 是否对图像进行归一化处理。 - image_mean (
float或List[float], 可选, 默认为 self.image_mean) — 在标准化图像时使用的均值。 - image_std (
float或List[float], 可选, 默认为 self.image_std) — 用于标准化图像时的标准差. - do_convert_annotations (
bool, 可选, 默认为 self.do_convert_annotations) — 是否将注释转换为模型期望的格式。将边界框从格式(top_left_x, top_left_y, width, height)转换为(center_x, center_y, width, height)并转换为相对坐标。 - do_pad (
bool, 可选, 默认为 self.do_pad) — 是否对图像进行填充。如果为True,将在图像的底部和右侧用零进行填充。如果提供了pad_size,图像将被填充到指定的尺寸。否则,图像将被填充到批次中的最大高度和宽度。 - format (
str或AnnotationFormat, 可选, 默认为 self.format) — 注释的格式. - return_tensors (
str或TensorType, 可选, 默认为 self.return_tensors) — 返回的张量类型。如果为None,将返回图像列表。 - data_format (
ChannelDimension或str, 可选, 默认为ChannelDimension.FIRST) — 输出图像的通道维度格式。可以是以下之一:"channels_first"或ChannelDimension.FIRST: 图像格式为 (num_channels, height, width)。"channels_last"或ChannelDimension.LAST: 图像格式为 (height, width, num_channels)。- 未设置:使用输入图像的通道维度格式。
- input_data_format (
ChannelDimension或str, 可选) — 输入图像的通道维度格式。如果未设置,则从输入图像推断通道维度格式。可以是以下之一:"channels_first"或ChannelDimension.FIRST: 图像格式为 (num_channels, height, width)。"channels_last"或ChannelDimension.LAST: 图像格式为 (height, width, num_channels)。"none"或ChannelDimension.NONE: 图像格式为 (height, width)。
- pad_size (
Dict[str, int], 可选) — 图像填充的大小{"height": int, "width" int}。必须大于预处理中提供的任何图像大小。 如果未提供pad_size,图像将被填充到批次中最大的高度和宽度。
预处理一张图像或一批图像,以便模型可以使用。
post_process_object_detection
< source >( outputs threshold: float = 0.5 target_sizes: typing.Union[transformers.utils.generic.TensorType, typing.List[typing.Tuple]] = None nms_threshold: float = 0.7 ) → List[Dict]
参数
- 输出 (
DetrObjectDetectionOutput) — 模型的原始输出。 - threshold (
float, optional, 默认为 0.5) — 用于保留物体检测预测的分数阈值。 - target_sizes (
torch.Tensor或List[Tuple[int, int]], 可选) — 形状为(batch_size, 2)的张量或包含批次中每个图像目标大小(高度,宽度)的元组列表 (Tuple[int, int])。如果留空,预测将不会调整大小。 - nms_threshold (
float, optional, defaults to 0.7) — NMS阈值.
返回
List[Dict]
一个字典列表,每个字典包含模型预测的批次中每张图像的分数、标签和框。
将DetaForObjectDetection的输出转换为最终边界框,格式为(左上角x,左上角y,右下角x,右下角y)。仅支持PyTorch。
DetaModel
类 transformers.DetaModel
< source >( config: DetaConfig )
参数
- config (DetaConfig) — 模型配置类,包含模型的所有参数。使用配置文件初始化不会加载与模型相关的权重,仅加载配置。查看 from_pretrained() 方法以加载模型权重。
裸的DETA模型(由骨干网络和编码器-解码器Transformer组成)输出原始隐藏状态,顶部没有任何特定的头部。
该模型继承自PreTrainedModel。请查看超类文档以了解库为其所有模型实现的通用方法(如下载或保存、调整输入嵌入的大小、修剪头部等)。
该模型也是一个PyTorch torch.nn.Module 子类。 将其作为常规的PyTorch模块使用,并参考PyTorch文档以获取与一般使用和行为相关的所有信息。
前进
< source >( pixel_values: FloatTensor pixel_mask: typing.Optional[torch.LongTensor] = None decoder_attention_mask: typing.Optional[torch.FloatTensor] = None encoder_outputs: typing.Optional[torch.FloatTensor] = None inputs_embeds: typing.Optional[torch.FloatTensor] = None decoder_inputs_embeds: typing.Optional[torch.FloatTensor] = None output_attentions: typing.Optional[bool] = None output_hidden_states: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.models.deprecated.deta.modeling_deta.DetaModelOutput 或 tuple(torch.FloatTensor)
参数
- pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Padding will be ignored by default should you provide it.可以使用AutoImageProcessor获取像素值。详情请参见
AutoImageProcessor.__call__()。 - pixel_mask (
torch.LongTensorof shape(batch_size, height, width), optional) — Mask to avoid performing attention on padding pixel values. Mask values selected in[0, 1]:- 1 for pixels that are real (i.e. not masked),
- 0 for pixels that are padding (i.e. masked).
- decoder_attention_mask (
torch.FloatTensorof shape(batch_size, num_queries), optional) — 默认不使用。可用于屏蔽对象查询。 - encoder_outputs (
tuple(tuple(torch.FloatTensor), 可选) — 元组由 (last_hidden_state, 可选:hidden_states, 可选:attentions)last_hidden_state的形状为(batch_size, sequence_length, hidden_size), 可选) 是编码器最后一层的输出隐藏状态序列。用于解码器的交叉注意力中。 - inputs_embeds (
torch.FloatTensorof shape(batch_size, sequence_length, hidden_size), optional) — 可选地,您可以选择直接传递图像的扁平化表示,而不是传递扁平化的特征图(骨干网络 + 投影层的输出)。 - decoder_inputs_embeds (
torch.FloatTensorof shape(batch_size, num_queries, hidden_size), optional) — 可选地,您可以选择直接传递嵌入表示,而不是用零张量初始化查询。 - output_attentions (
bool, 可选) — 是否返回所有注意力层的注意力张量。有关更多详细信息,请参见返回张量下的attentions。 - output_hidden_states (
bool, 可选) — 是否返回所有层的隐藏状态。有关更多详细信息,请参见返回张量下的hidden_states。 - return_dict (
bool, 可选) — 是否返回一个 ModelOutput 而不是一个普通的元组。
返回
transformers.models.deprecated.deta.modeling_deta.DetaModelOutput 或 tuple(torch.FloatTensor)
一个 transformers.models.deprecated.deta.modeling_deta.DetaModelOutput 或一个由 torch.FloatTensor 组成的元组(如果传递了 return_dict=False 或当 config.return_dict=False 时),包含根据配置(DetaConfig)和输入的各种元素。
- init_reference_points (
torch.FloatTensor形状为(batch_size, num_queries, 4)) — 通过Transformer解码器发送的初始参考点。 - last_hidden_state (
torch.FloatTensor形状为(batch_size, num_queries, hidden_size)) — 模型解码器最后一层输出的隐藏状态序列。 - intermediate_hidden_states (
torch.FloatTensor形状为(batch_size, config.decoder_layers, num_queries, hidden_size)) — 堆叠的中间隐藏状态(解码器每层的输出)。 - intermediate_reference_points (
torch.FloatTensor形状为(batch_size, config.decoder_layers, num_queries, 4)) — 堆叠的中间参考点(解码器每层的参考点)。 - decoder_hidden_states (
tuple(torch.FloatTensor), 可选, 当传递output_hidden_states=True或当config.output_hidden_states=True时返回) — 由torch.FloatTensor组成的元组(一个用于嵌入输出,一个用于每层的输出),形状为(batch_size, num_queries, hidden_size)。解码器每层输出的隐藏状态加上初始嵌入输出。 - decoder_attentions (
tuple(torch.FloatTensor), 可选, 当传递output_attentions=True或当config.output_attentions=True时返回) — 由torch.FloatTensor组成的元组(每层一个),形状为(batch_size, num_heads, num_queries, num_queries)。解码器的注意力权重,在注意力softmax之后,用于计算自注意力头中的加权平均值。 - cross_attentions (
tuple(torch.FloatTensor), 可选, 当传递output_attentions=True或当config.output_attentions=True时返回) — 由torch.FloatTensor组成的元组(每层一个),形状为(batch_size, num_queries, num_heads, 4, 4)。解码器交叉注意力层的注意力权重,在注意力softmax之后,用于计算交叉注意力头中的加权平均值。 - encoder_last_hidden_state (
torch.FloatTensor形状为(batch_size, sequence_length, hidden_size), 可选) — 模型编码器最后一层输出的隐藏状态序列。 - encoder_hidden_states (
tuple(torch.FloatTensor), 可选, 当传递output_hidden_states=True或当config.output_hidden_states=True时返回) — 由torch.FloatTensor组成的元组(一个用于嵌入输出,一个用于每层的输出),形状为(batch_size, sequence_length, hidden_size)。编码器每层输出的隐藏状态加上初始嵌入输出。 - encoder_attentions (
tuple(torch.FloatTensor), 可选, 当传递output_attentions=True或当config.output_attentions=True时返回) — 由torch.FloatTensor组成的元组(每层一个),形状为(batch_size, num_queries, num_heads, 4, 4)。编码器的注意力权重,在注意力softmax之后,用于计算自注意力头中的加权平均值。 - enc_outputs_class (
torch.FloatTensor形状为(batch_size, sequence_length, config.num_labels), 可选, 当config.with_box_refine=True和config.two_stage=True时返回) — 预测的边界框分数,其中前config.two_stage_num_proposals个得分最高的边界框在第一阶段被选为区域提议。边界框二元分类的输出(即前景和背景)。 - enc_outputs_coord_logits (
torch.FloatTensor形状为(batch_size, sequence_length, 4), 可选, 当config.with_box_refine=True和config.two_stage=True时返回) — 第一阶段预测的边界框坐标的logits。 - output_proposals (
torch.FloatTensor形状为(batch_size, sequence_length, 4), 可选, 当config.two_stage=True时返回) — 在gen_encoder_output_proposals中提议的边界框坐标的logits。
DetaModel 的前向方法,重写了 __call__ 特殊方法。
尽管前向传递的配方需要在此函数内定义,但之后应该调用Module实例而不是这个,因为前者负责运行预处理和后处理步骤,而后者会默默地忽略它们。
示例:
>>> from transformers import AutoImageProcessor, DetaModel
>>> from PIL import Image
>>> import requests
>>> url = "http://images.cocodataset.org/val2017/000000039769.jpg"
>>> image = Image.open(requests.get(url, stream=True).raw)
>>> image_processor = AutoImageProcessor.from_pretrained("jozhang97/deta-swin-large-o365")
>>> model = DetaModel.from_pretrained("jozhang97/deta-swin-large-o365", two_stage=False)
>>> inputs = image_processor(images=image, return_tensors="pt")
>>> outputs = model(**inputs)
>>> last_hidden_states = outputs.last_hidden_state
>>> list(last_hidden_states.shape)
[1, 900, 256]DetaForObjectDetection
类 transformers.DetaForObjectDetection
< source >( config: DetaConfig )
参数
- config (DetaConfig) — 模型配置类,包含模型的所有参数。使用配置文件初始化不会加载与模型相关的权重,只会加载配置。查看 from_pretrained() 方法以加载模型权重。
DETA模型(由骨干网络和编码器-解码器Transformer组成),顶部带有目标检测头,适用于COCO检测等任务。
该模型继承自PreTrainedModel。请查看超类文档以了解库为其所有模型实现的通用方法(如下载或保存、调整输入嵌入的大小、修剪头部等)。
该模型也是一个PyTorch torch.nn.Module 子类。 将其作为常规的PyTorch模块使用,并参考PyTorch文档以获取与一般使用和行为相关的所有信息。
前进
< source >( pixel_values: FloatTensor pixel_mask: typing.Optional[torch.LongTensor] = None decoder_attention_mask: typing.Optional[torch.FloatTensor] = None encoder_outputs: typing.Optional[torch.FloatTensor] = None inputs_embeds: typing.Optional[torch.FloatTensor] = None decoder_inputs_embeds: typing.Optional[torch.FloatTensor] = None labels: typing.Optional[typing.List[dict]] = None output_attentions: typing.Optional[bool] = None output_hidden_states: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.models.deprecated.deta.modeling_deta.DetaObjectDetectionOutput 或 tuple(torch.FloatTensor)
参数
- pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Padding will be ignored by default should you provide it.可以使用AutoImageProcessor获取像素值。详情请参见
AutoImageProcessor.__call__()。 - pixel_mask (
torch.LongTensorof shape(batch_size, height, width), optional) — Mask to avoid performing attention on padding pixel values. Mask values selected in[0, 1]:- 1 for pixels that are real (i.e. not masked),
- 0 for pixels that are padding (i.e. masked).
- decoder_attention_mask (
torch.FloatTensorof shape(batch_size, num_queries), optional) — 默认不使用。可用于屏蔽对象查询。 - encoder_outputs (
tuple(tuple(torch.FloatTensor), 可选的) — 元组由 (last_hidden_state, 可选的:hidden_states, 可选的:attentions) 组成last_hidden_state的形状为(batch_size, sequence_length, hidden_size), 可选的) 是编码器最后一层输出的隐藏状态序列。用于解码器的交叉注意力机制中。 - inputs_embeds (
torch.FloatTensorof shape(batch_size, sequence_length, hidden_size), optional) — 可选地,您可以选择直接传递图像的扁平化表示,而不是传递扁平化的特征图(骨干网络 + 投影层的输出)。 - decoder_inputs_embeds (
torch.FloatTensorof shape(batch_size, num_queries, hidden_size), optional) — 可选地,您可以选择直接传递嵌入表示,而不是用零张量初始化查询。 - output_attentions (
bool, 可选) — 是否返回所有注意力层的注意力张量。有关更多详细信息,请参见返回张量下的attentions。 - output_hidden_states (
bool, 可选) — 是否返回所有层的隐藏状态。有关更多详细信息,请参见返回张量下的hidden_states。 - return_dict (
bool, 可选) — 是否返回一个 ModelOutput 而不是一个普通的元组。 - labels (
List[Dict]长度为(batch_size,), 可选) — 用于计算二分匹配损失的标签。字典列表,每个字典至少包含以下两个键:'class_labels' 和 'boxes'(分别是批次中图像的类别标签和边界框)。类别标签本身应该是长度为(图像中边界框的数量,)的torch.LongTensor,而边界框应该是形状为(图像中边界框的数量, 4)的torch.FloatTensor。
返回
transformers.models.deprecated.deta.modeling_deta.DetaObjectDetectionOutput 或 tuple(torch.FloatTensor)
一个 transformers.models.deprecated.deta.modeling_deta.DetaObjectDetectionOutput 或一个由
torch.FloatTensor 组成的元组(如果传递了 return_dict=False 或当 config.return_dict=False 时),包含各种
元素,具体取决于配置(DetaConfig)和输入。
- loss (
torch.FloatTensor形状为(1,),可选,当提供labels时返回) — 总损失,作为类别预测的负对数似然(交叉熵)和 边界框损失的线性组合。后者定义为 L1 损失和广义 尺度不变 IoU 损失的线性组合。 - loss_dict (
Dict,可选) — 包含各个损失的字典。用于记录日志。 - logits (
torch.FloatTensor形状为(batch_size, num_queries, num_classes + 1)) — 所有查询的分类 logits(包括无对象)。 - pred_boxes (
torch.FloatTensor形状为(batch_size, num_queries, 4)) — 所有查询的归一化框坐标,表示为 (center_x, center_y, width, height)。这些 值在 [0, 1] 范围内归一化,相对于批次中每个单独图像的大小(忽略 可能的填充)。您可以使用~DetaProcessor.post_process_object_detection来检索 未归一化的边界框。 - auxiliary_outputs (
list[Dict],可选) — 可选,仅在激活辅助损失时返回(即config.auxiliary_loss设置为True) 并且提供了标签。它是一个字典列表,包含上述两个键(logits和pred_boxes)用于每个解码器层。 - last_hidden_state (
torch.FloatTensor形状为(batch_size, num_queries, hidden_size),可选) — 模型解码器最后一层输出的隐藏状态序列。 - decoder_hidden_states (
tuple(torch.FloatTensor),可选,当传递output_hidden_states=True或config.output_hidden_states=True时返回) —torch.FloatTensor的元组(一个用于嵌入输出 + 一个用于每层输出)形状为(batch_size, num_queries, hidden_size)。解码器在每层输出处的隐藏状态 加上初始嵌入输出。 - decoder_attentions (
tuple(torch.FloatTensor),可选,当传递output_attentions=True或config.output_attentions=True时返回) —torch.FloatTensor的元组(每层一个)形状为(batch_size, num_heads, num_queries, num_queries)。解码器的注意力权重,在注意力 softmax 之后,用于计算加权 平均在自注意力头中。 - cross_attentions (
tuple(torch.FloatTensor),可选,当传递output_attentions=True或config.output_attentions=True时返回) —torch.FloatTensor的元组(每层一个)形状为(batch_size, num_queries, num_heads, 4, 4)。 解码器交叉注意力层的注意力权重,在注意力 softmax 之后,用于计算 加权平均在交叉注意力头中。 - encoder_last_hidden_state (
torch.FloatTensor形状为(batch_size, sequence_length, hidden_size),可选) — 模型编码器最后一层输出的隐藏状态序列。 - encoder_hidden_states (
tuple(torch.FloatTensor),可选,当传递output_hidden_states=True或config.output_hidden_states=True时返回) —torch.FloatTensor的元组(一个用于嵌入输出 + 一个用于每层输出)形状为(batch_size, sequence_length, hidden_size)。编码器在每层输出处的隐藏状态 加上初始嵌入输出。 - encoder_attentions (
tuple(torch.FloatTensor),可选,当传递output_attentions=True或config.output_attentions=True时返回) —torch.FloatTensor的元组(每层一个)形状为(batch_size, sequence_length, num_heads, 4, 4)。编码器的注意力权重,在注意力 softmax 之后,用于计算加权平均 在自注意力头中。 - intermediate_hidden_states (
torch.FloatTensor形状为(batch_size, config.decoder_layers, num_queries, hidden_size)) — 堆叠的中间隐藏状态(解码器每层的输出)。 - intermediate_reference_points (
torch.FloatTensor形状为(batch_size, config.decoder_layers, num_queries, 4)) — 堆叠的中间参考点(解码器每层的参考点)。 - init_reference_points (
torch.FloatTensor形状为(batch_size, num_queries, 4)) — 通过 Transformer 解码器发送的初始参考点。 - enc_outputs_class (
torch.FloatTensor形状为(batch_size, sequence_length, config.num_labels),可选,当config.with_box_refine=True和config.two_stage=True时返回) — 预测的边界框分数,其中前config.two_stage_num_proposals个得分最高的边界框被 选为第一阶段的区域提议。边界框二元分类的输出(即 前景和背景)。 - enc_outputs_coord_logits (
torch.FloatTensor形状为(batch_size, sequence_length, 4),可选,当config.with_box_refine=True和config.two_stage=True时返回) — 第一阶段预测的边界框坐标的 logits。 - output_proposals (
torch.FloatTensor形状为(batch_size, sequence_length, 4),可选,当config.two_stage=True时返回) — 在 gen_encoder_output_proposals 中提议的边界框坐标的 logits。
DetaForObjectDetection 的前向方法,重写了 __call__ 特殊方法。
尽管前向传递的配方需要在此函数内定义,但之后应该调用Module实例而不是这个,因为前者负责运行预处理和后处理步骤,而后者会默默地忽略它们。
示例:
>>> from transformers import AutoImageProcessor, DetaForObjectDetection
>>> from PIL import Image
>>> import requests
>>> url = "http://images.cocodataset.org/val2017/000000039769.jpg"
>>> image = Image.open(requests.get(url, stream=True).raw)
>>> image_processor = AutoImageProcessor.from_pretrained("jozhang97/deta-swin-large")
>>> model = DetaForObjectDetection.from_pretrained("jozhang97/deta-swin-large")
>>> inputs = image_processor(images=image, return_tensors="pt")
>>> outputs = model(**inputs)
>>> # convert outputs (bounding boxes and class logits) to Pascal VOC format (xmin, ymin, xmax, ymax)
>>> target_sizes = torch.tensor([image.size[::-1]])
>>> results = image_processor.post_process_object_detection(outputs, threshold=0.5, target_sizes=target_sizes)[
... 0
... ]
>>> for score, label, box in zip(results["scores"], results["labels"], results["boxes"]):
... box = [round(i, 2) for i in box.tolist()]
... print(
... f"Detected {model.config.id2label[label.item()]} with confidence "
... f"{round(score.item(), 3)} at location {box}"
... )
Detected cat with confidence 0.802 at location [9.87, 54.36, 316.93, 473.44]
Detected cat with confidence 0.795 at location [346.62, 24.35, 639.62, 373.2]
Detected remote with confidence 0.725 at location [40.41, 73.36, 175.77, 117.29]
Detected remote with confidence 0.638 at location [333.34, 76.81, 370.22, 187.94]
Detected couch with confidence 0.584 at location [0.03, 0.99, 640.02, 474.93]