VAN
此模型仅处于维护模式,我们不接受任何更改其代码的新PR。
如果您在运行此模型时遇到任何问题,请重新安装支持此模型的最后一个版本:v4.30.0。
您可以通过运行以下命令来执行此操作:pip install -U transformers==4.30.0。
概述
VAN模型由Meng-Hao Guo、Cheng-Ze Lu、Zheng-Ning Liu、Ming-Ming Cheng、Shi-Min Hu在Visual Attention Network中提出。
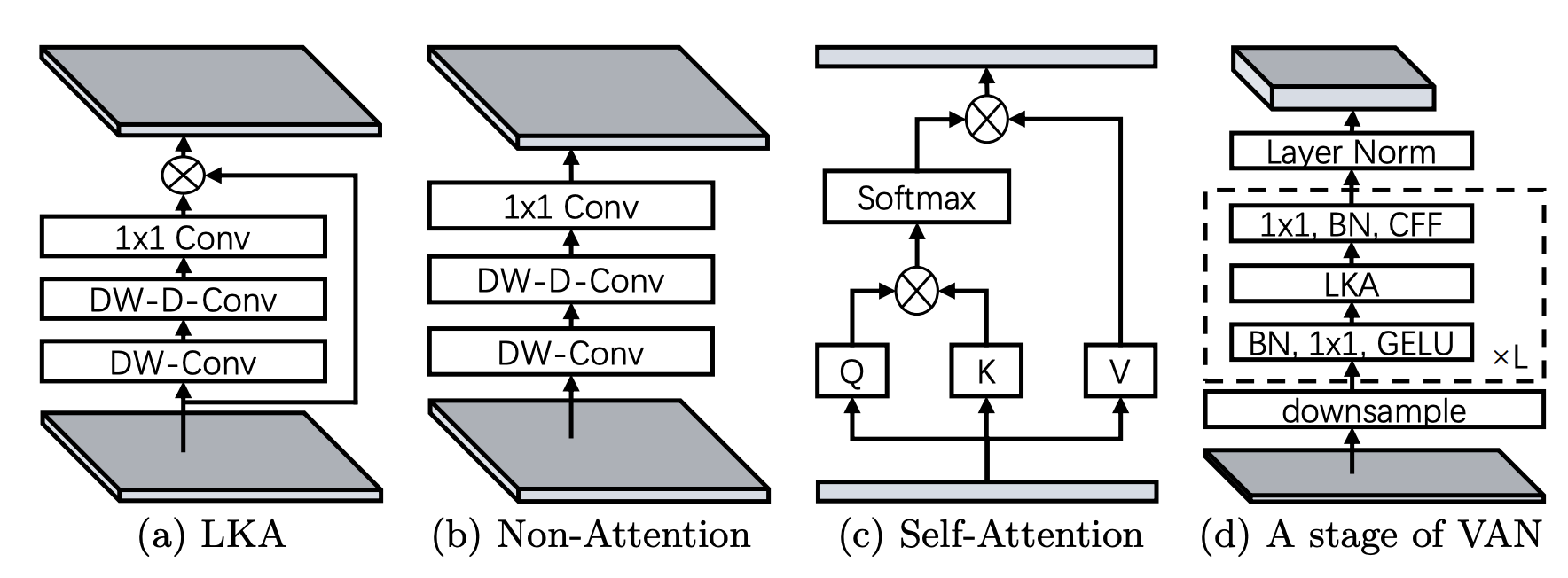
本文介绍了一种基于卷积操作的新注意力层,能够捕捉局部和远距离的关系。这是通过结合普通卷积层和大核卷积层来实现的。后者使用扩张卷积来捕捉远距离的相关性。
论文的摘要如下:
虽然最初是为自然语言处理任务设计的,但自注意力机制最近在各种计算机视觉领域引起了轰动。然而,图像的二维特性为在计算机视觉中应用自注意力机制带来了三个挑战。(1) 将图像视为一维序列忽略了它们的二维结构。(2) 对于高分辨率图像,二次复杂度过于昂贵。(3) 它只捕捉空间适应性,而忽略了通道适应性。在本文中,我们提出了一种新的大核注意力(LKA)模块,以在自注意力中实现自适应和长程相关性,同时避免上述问题。我们进一步引入了一种基于LKA的新型神经网络,即视觉注意力网络(VAN)。尽管极其简单,VAN在广泛的实验中,包括图像分类、目标检测、语义分割、实例分割等,大幅超越了最先进的视觉变换器和卷积神经网络。代码可在此https URL获取。
提示:
- VAN 没有嵌入层,因此
hidden_states的长度将等于阶段的数量。
下图展示了视觉注意力层的架构。取自原始论文。
资源
一份官方的Hugging Face和社区(由🌎表示)资源列表,帮助您开始使用VAN。
- VanForImageClassification 由这个 示例脚本 和 笔记本 支持。
- 另请参阅:图像分类任务指南
如果您有兴趣提交资源以包含在此处,请随时打开一个 Pull Request,我们将进行审核!理想情况下,资源应展示一些新内容,而不是重复现有资源。
VanConfig
类 transformers.VanConfig
< source >( image_size = 224 num_channels = 3 patch_sizes = [7, 3, 3, 3] strides = [4, 2, 2, 2] hidden_sizes = [64, 128, 320, 512] depths = [3, 3, 12, 3] mlp_ratios = [8, 8, 4, 4] hidden_act = 'gelu' initializer_range = 0.02 layer_norm_eps = 1e-06 layer_scale_init_value = 0.01 drop_path_rate = 0.0 dropout_rate = 0.0 **kwargs )
参数
- image_size (
int, optional, 默认为 224) — 每张图片的大小(分辨率)。 - num_channels (
int, optional, 默认为 3) — 输入通道的数量。 - patch_sizes (
List[int], 可选, 默认为[7, 3, 3, 3]) — 在每个阶段的嵌入层中使用的补丁大小。 - strides (
List[int], 可选, 默认为[4, 2, 2, 2]) — 在每个阶段的嵌入层中使用的步幅大小,用于下采样输入。 - hidden_sizes (
List[int], 可选, 默认为[64, 128, 320, 512]) — 每个阶段的维度(隐藏大小)。 - depths (
List[int], optional, defaults to[3, 3, 12, 3]) — 每个阶段的深度(层数)。 - mlp_ratios (
List[int], 可选, 默认为[8, 8, 4, 4]) — 每个阶段mlp层的扩展比率。 - hidden_act (
str或function, 可选, 默认为"gelu") — 每层中的非线性激活函数(函数或字符串)。如果是字符串,支持"gelu","relu","selu"和"gelu_new". - initializer_range (
float, 可选, 默认为 0.02) — 用于初始化所有权重矩阵的截断正态初始化器的标准差。 - layer_norm_eps (
float, optional, defaults to 1e-06) — 层归一化层使用的epsilon值。 - layer_scale_init_value (
float, optional, defaults to 0.01) — 层缩放的初始值。 - drop_path_rate (
float, optional, defaults to 0.0) — 随机深度的丢弃概率。 - dropout_rate (
float, optional, defaults to 0.0) — dropout的概率
这是用于存储VanModel配置的配置类。它用于根据指定的参数实例化一个VAN模型,定义模型架构。使用默认值实例化配置将产生类似于VAN Visual-Attention-Network/van-base架构的配置。
配置对象继承自PretrainedConfig,可用于控制模型输出。阅读PretrainedConfig的文档以获取更多信息。
示例:
>>> from transformers import VanModel, VanConfig
>>> # Initializing a VAN van-base style configuration
>>> configuration = VanConfig()
>>> # Initializing a model from the van-base style configuration
>>> model = VanModel(configuration)
>>> # Accessing the model configuration
>>> configuration = model.configVanModel
类 transformers.VanModel
< source >( config )
参数
- config (VanConfig) — 包含模型所有参数的模型配置类。 使用配置文件初始化不会加载与模型相关的权重,只会加载配置。查看 from_pretrained() 方法以加载模型权重。
裸VAN模型输出原始特征,没有任何特定的头部。注意,VAN没有嵌入层。 该模型是PyTorch torch.nn.Module 的子类。将其用作常规的PyTorch模块,并参考PyTorch文档以获取与一般使用和行为相关的所有信息。
前进
< source >( pixel_values: typing.Optional[torch.FloatTensor] output_hidden_states: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.modeling_outputs.BaseModelOutputWithPoolingAndNoAttention 或 tuple(torch.FloatTensor)
参数
- pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — 像素值。像素值可以使用AutoImageProcessor获取。详情请参见 ConvNextImageProcessor.call(). - output_hidden_states (
bool, optional) — 是否返回所有阶段的隐藏状态。有关更多详细信息,请参见返回张量下的hidden_states。 - return_dict (
bool, 可选) — 是否返回一个ModelOutput而不是一个普通的元组。
返回
transformers.modeling_outputs.BaseModelOutputWithPoolingAndNoAttention 或 tuple(torch.FloatTensor)
一个 transformers.modeling_outputs.BaseModelOutputWithPoolingAndNoAttention 或一个由
torch.FloatTensor 组成的元组(如果传递了 return_dict=False 或当 config.return_dict=False 时),包含各种
元素,取决于配置(VanConfig)和输入。
-
last_hidden_state (
torch.FloatTensor形状为(batch_size, num_channels, height, width)) — 模型最后一层输出的隐藏状态序列。 -
pooler_output (
torch.FloatTensor形状为(batch_size, hidden_size)) — 在空间维度上进行池化操作后的最后一层隐藏状态。 -
hidden_states (
tuple(torch.FloatTensor), 可选, 当传递了output_hidden_states=True或当config.output_hidden_states=True时返回) — 由torch.FloatTensor组成的元组(一个用于嵌入层的输出,如果模型有嵌入层,+ 一个用于每一层的输出)形状为(batch_size, num_channels, height, width)。模型在每一层输出时的隐藏状态加上可选的初始嵌入输出。
VanModel 的前向方法,重写了 __call__ 特殊方法。
尽管前向传递的配方需要在此函数内定义,但之后应该调用Module实例而不是这个,因为前者负责运行预处理和后处理步骤,而后者会默默地忽略它们。
示例:
>>> from transformers import AutoImageProcessor, VanModel
>>> import torch
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image", trust_remote_code=True)
>>> image = dataset["test"]["image"][0]
>>> image_processor = AutoImageProcessor.from_pretrained("Visual-Attention-Network/van-base")
>>> model = VanModel.from_pretrained("Visual-Attention-Network/van-base")
>>> inputs = image_processor(image, return_tensors="pt")
>>> with torch.no_grad():
... outputs = model(**inputs)
>>> last_hidden_states = outputs.last_hidden_state
>>> list(last_hidden_states.shape)
[1, 512, 7, 7]VanForImageClassification
类 transformers.VanForImageClassification
< source >( config )
参数
- config (VanConfig) — 包含模型所有参数的模型配置类。 使用配置文件初始化不会加载与模型相关的权重,只会加载配置。查看 from_pretrained() 方法以加载模型权重。
VAN模型,顶部带有图像分类头(在池化特征之上的线性层),例如用于ImageNet。
该模型是一个PyTorch torch.nn.Module 子类。将其用作常规的PyTorch模块,并参考PyTorch文档以获取与一般使用和行为相关的所有信息。
前进
< source >( pixel_values: typing.Optional[torch.FloatTensor] = None labels: typing.Optional[torch.LongTensor] = None output_hidden_states: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.modeling_outputs.ImageClassifierOutputWithNoAttention 或 tuple(torch.FloatTensor)
参数
- pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — 像素值。像素值可以使用AutoImageProcessor获取。详情请参见 ConvNextImageProcessor.call(). - output_hidden_states (
bool, 可选) — 是否返回所有阶段的隐藏状态。有关更多详细信息,请参见返回张量下的hidden_states。 - return_dict (
bool, 可选) — 是否返回一个 ModelOutput 而不是一个普通的元组。 - labels (
torch.LongTensorof shape(batch_size,), optional) — 用于计算图像分类/回归损失的标签。索引应在[0, ..., config.num_labels - 1]范围内。如果config.num_labels == 1,则计算回归损失(均方损失),如果config.num_labels > 1,则计算分类损失(交叉熵)。
返回
transformers.modeling_outputs.ImageClassifierOutputWithNoAttention 或 tuple(torch.FloatTensor)
一个 transformers.modeling_outputs.ImageClassifierOutputWithNoAttention 或一个由
torch.FloatTensor 组成的元组(如果传递了 return_dict=False 或当 config.return_dict=False 时),包含各种
元素,具体取决于配置(VanConfig)和输入。
- loss (
torch.FloatTensor形状为(1,),可选,当提供labels时返回) — 分类(或回归,如果 config.num_labels==1)损失。 - logits (
torch.FloatTensor形状为(batch_size, config.num_labels)) — 分类(或回归,如果 config.num_labels==1)得分(在 SoftMax 之前)。 - hidden_states (
tuple(torch.FloatTensor),可选,当传递output_hidden_states=True或当config.output_hidden_states=True时返回) — 由torch.FloatTensor组成的元组(一个用于嵌入层的输出,如果模型有嵌入层,+ 一个用于每个阶段的输出)形状为(batch_size, num_channels, height, width)。模型在每个阶段输出的隐藏状态(也称为特征图)。
VanForImageClassification 的前向方法,重写了 __call__ 特殊方法。
尽管前向传递的配方需要在此函数内定义,但之后应该调用Module实例而不是这个,因为前者负责运行预处理和后处理步骤,而后者会默默地忽略它们。
示例:
>>> from transformers import AutoImageProcessor, VanForImageClassification
>>> import torch
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image", trust_remote_code=True)
>>> image = dataset["test"]["image"][0]
>>> image_processor = AutoImageProcessor.from_pretrained("Visual-Attention-Network/van-base")
>>> model = VanForImageClassification.from_pretrained("Visual-Attention-Network/van-base")
>>> inputs = image_processor(image, return_tensors="pt")
>>> with torch.no_grad():
... logits = model(**inputs).logits
>>> # model predicts one of the 1000 ImageNet classes
>>> predicted_label = logits.argmax(-1).item()
>>> print(model.config.id2label[predicted_label])
tabby, tabby cat